第2回 UMLロボットコンテスト
競技規約
以下の規約は、全てショート、障害の両部門を対象としたものです。
競技規約
UMLロボットコンテスト競技に関して、コース、走行体、審査などについて 述べてあります。
競技規約(Word:824KB)
競技規約(PDF:403KB)
勾配の規約
コース途中に設けられる勾配(坂)についての説明です。
勾配の規約(Word:62KB)
勾配の規約(PDF:37KB)
勾配の実験動画
コース途中に設けられる勾配の走行実験を行いました。
ライントレースによりコースを走行し、漆黒線を判断したらモータパワーを上げ、
坂を上ります。坂の下りでモータパワーを下げることで確実に坂を下りるように
しました。
勾配実験の動画
スカート(遮光体)について
光センサに取り付けるスカート(遮光体)についての規約が追加されました。
光センサによりコース(地面)の明暗値を顕著に認識する
必要があるため、以下の目的で装着が推奨されています。
ショートトラック部門:コース途中に設けられる勾配(坂)の開始を判別するため。
レスキュー部門:グラディエント部分の明暗を検知するため。
スカートの規約(Word:340KB)
スカートの規約(pdf:26KB)
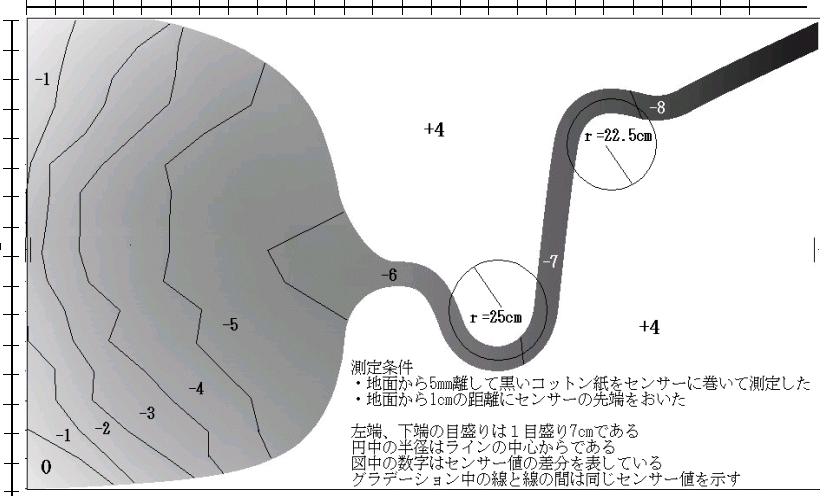
レスキュー部門:グラデーション拡大図
グラデーション部分の明暗を数値で現しています。
レスキュー部門 グラデーション部
Copyright2003 EIWA SYSTEM MANAGEMENT, INC. All Rights Reserved.



{kind=link}