第2回 UMLロボットコンテスト
第2回 試走会 終了報告
2003/4/11(土)
10:30-15:00 ショート部門
15:00-16:30 レスキュー部門
場所:東京大学工学部5号館

桜 舞う 春の東京大学
協力:組込みソフトウェア技術者・管理者育成研究会

本番装飾が組み込まれたコース全景

本番では噴火する?

シーサイド・スロープ

ウォーター・フォール

水辺を疾走するUMLロボット

火山 そして、たくましく花崗岩に自生する草

牧場の家々

コースは、厚木のアーティストによる作品です

厳しい闘いを演出する今年のコース

闘うエンジニア
日本最強の組込みエンジニアを目指して



本日、運営委員会が把握したショートトラック部門の速いタイムは、1)22sec 2)28sec 3)31sec でした。
ライトセンサーをいかに速く、そしてなめらかに制御するか、および直線、カーブ、登り下りでのトラクション・コントロール、 これらを完璧に制御しないと優勝への道は開けません。

手強いレスキュー・コース、イメージ・シミュレーション中

走行、記録、チェック、議論、修正
このイテレーションを繰り返す



センサーのスカート 工夫中です
レスキュー部門 (囚われのお姫様を救出)


|
調整に苦しみながらも、楽しく闘うエンジニア達 満員御礼 |

|

|

|
|

|

|

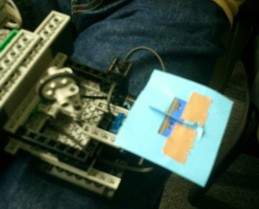
レリフト機構が新タイプとなった”囚われの壁”


お姫様を助けるUMLロボットを待ち受ける火山
レスキューコースは、厚木のアーティストの弟子にあたる港区のアーティストの作品です。

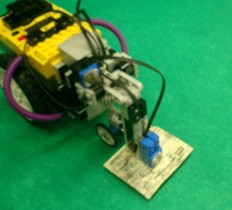
最終型に近いと思われる参加ロボット
レスキュー部門では、素早い回転によるグラデーション認知を実現するため前輪駆動、後輪は1つでフリーとなったものが多いようです。

壁の計測には余念がない。
現物仕様確認は重要です。
第2回試走では、レスキュー部門の各チームが、かなりの苦労をしていたようです。
スピードと正確性が、ほぼトレードオフの関係になっているようですが、
本番で、みなさんの工夫されたアイディアとアルゴリズムが
見られることを期待しております。
ガンバロー!!
運営委員会によるレスキューのテスト映像はこちらです。
スピードと正確性が、ほぼトレードオフの関係になっているようですが、
本番で、みなさんの工夫されたアイディアとアルゴリズムが
見られることを期待しております。
ガンバロー!!
運営委員会によるレスキューのテスト映像はこちらです。
Copyright2003 EIWA SYSTEM MANAGEMENT, INC. All Rights Reserved.


