

第1回 UMLロボットコンテスト
チーム WITH「UMLロボットコンテスト 優勝への道」
今回の UML ロボットコンテストの目玉は、 一つの主題に対して描かれた たくさんのモデル図でした。
ロボットを早く走らせるという同じ主題を各チームがそれぞれのやり方で表現し、
異なる表現のモデル図 20枚以上が、一堂に会した珍しい機会だったのです。

チーム WITHの目標
かっこいーモデルを作る
↓
オブジェクト指向技術&UML
分野での
アイドルになる。
↓
そして、優勝!
チーム WITH のマーク
チーム WITH は、真っ赤なチューリップが目印です。


チーム WITH の ロボコンカレンダー
カレンダーの日付をクリックすると、その日の作業日誌が出てきます。
「ロボコン 優勝への道」

チーム WITH のメンバ
リーダー
☆チーム WITH のリーダーになったきっかけは?
アドバイザとしての参加だと思っていたのに、気づいたらリーダーでした。いつの間に?!
☆ロボコンでのリーダーの目標
良い感じのモデルが作成できればOK!
タイムも良ければ、なお良しです。
アドバイザ
☆チーム WITH のアドバイザになったきっかけは?
やっぱり LEGO でしょ。
LEGO で UML やるって聞いた時から
ぼくの心はとりこさ。
☆ロボコンを通じて、一番知りたいこと
UML って本当に有効か,ってところ。
正直言って、LEGO ロボットに UML って似合わないでしょ。
「作ってみて、動かしてみて、また直して」っていう作業の楽しさが LEGO にはある。
でも、UML には、「いかにも設計しました」って感じが出てしまう。ミスマッチがあるんです。
つまり、今回は UML をそのまま使ってもたいしたことできない。
UML を今回の素材(LEGO)に合うように、いかにうまくカスタマイズするか、を 勝負にしたいです。
それに、LEGO はとってもかわいいけど、UML はあんまりかわいくない。
だから、今回は、UML のダイヤグラムにも遊び心が入ったかわいいものにしたいと思います。
メンバその1(Iさん)
☆チーム WITH のメンバになったきっかけは?
UMLについての知識はないけれど、とにかくいい機会だから、やってみようと思って。
☆ロボコンでの個人目標
チーム開発の雰囲気に慣れること。
メンバその2(Hさん)
☆チーム WITH のメンバになったきっかけは?
もっとみんなと交流したいって、思ってたから。
☆ロボコンでの個人目標
コミュニケーションはいかに大切かを実感する。
自分に何が必要かを見極める。
メンバその3(Kさん)
☆チーム WITH のメンバになったきっかけは?
UMLって何ぞや?っていう状態で、勉強を始めようと思っていたところに、ロボコンの話が転がってきた。
☆ロボコンでの個人目標
一もニもなくUMLに慣れること。
この機会に、楽しみながら、勉強していこうと思います。

2/25(月)決起集会!
今日の一句「欲しいのは UMLの 知識だけ?」
今日は、決起集会です。初めて全員そろって、あーだこーだ話します。
もちろん、リーダーも、アドバイザも、メンバも。その他、野次馬も居ます。
本日の作業予定
- 1.みんなの名前を覚える。
- 2.レゴマインドストームに慣れる。
- 3.楽しむ。
- 4.決起集会
メンバの気持ち
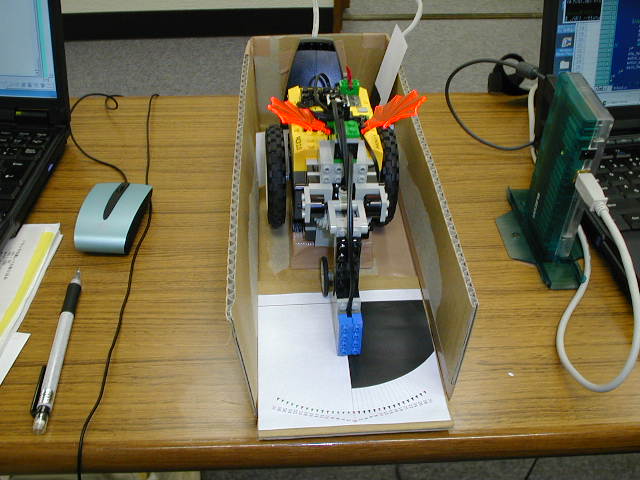
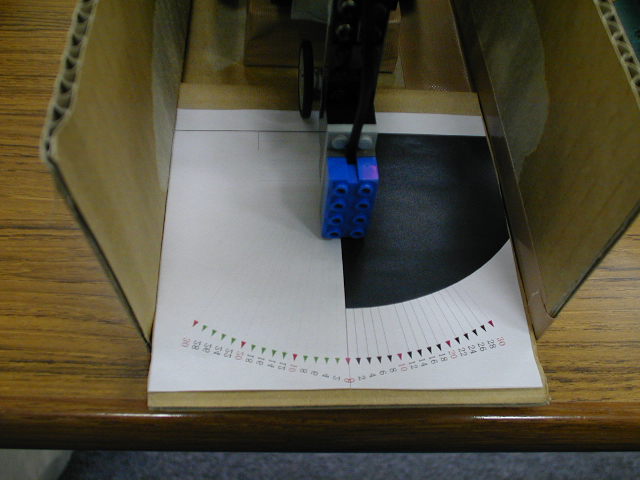
☆I さん、初めてレゴマインドストームに挑戦!
UMLとJavaという言葉に不安をいだきつつ初めてレゴマインドストームを扱いました。左右のタイヤとセンサの値を使って、楕円形の黒線の上を進む制御をしました。
規定の車の要素は前輪・後輪・センサです。この車を作っている間「まぁいいか」
「たぶんこんな風」という声が聞こえていた気がします。
キックオフ会ではおいしい物をいただきながら、いろいろなお話ができました。
WITHのシールはかわいいと思います。
この日のチームの雰囲気は?
☆Kさんの心の声を聞いてみる・・
2月25日月曜日,真剣な面持ちで決起集会は始まった・・・。
ひょっこりひょうたん島の歌を歌う者あり,フェイスペインティング?
する者あり,
寿司をむさぼり食う者あり,ロボコン優勝への意気込みを
感じた?決起集会でした.
リーダーのつぶやき
Javaの速度に微妙に不安はあるけど、API説明をした手前&設定が楽なのでJavaを選択。
簡単なサンプルを動かしてもらいました。
明日からが本番です。まともに動くものができるでしょうか?
決起集会での一場面
突如、ひょっこりひょうたん島の歌を歌いだしたプロデューサー。
「これが、ウィズのテーマソングだー。な、ぴったりだろ?」 とみんなに同意を
求めていました。
2/26(火)
今日の一句「物知らず 手取り足取り 旗揚げだ」
本格的に、全員集合しての作業開始です。みんな、マシンに向かって、カタカタと
キーボードを打っています。いい感じ。
本日の作業予定
- 1.くるまの方向性を決める(その1)
- 2.規定のくるまを組み立てる。
- 3.楽しむ。
メンバの気持ち
☆Iさん
規定の車を使っての制御にチャレンジです。
センサを使って黒線のふちをたどる制御はできました。
たぶんこれが基本の制御となるのでしょう。
ただ前輪と後輪のスピードをめいっぱい上げられないようです。
☆Hさんの発見
初の本格的な作業日。期待と不安が入り混じるこの何とも言えない妙な気持ち。
開発環境整備、インストール作業は順調。順風満帆なプロジェクトスタート!
ロボットって車だったんだと初めて知りました(笑)。
リーダーのつぶやき
もくもくとパスファインダーを製作しました。結構面倒…。
なんか微妙に形が違うのは気のせいでしょうか?
3/4(月)
今日の一句「ガキ心 忘れた頃に 思い出す」
本日の作業予定
- 1.くるまの方向性を決める(その2)
- 2.速く走りたい。
- 3.楽しむ。
メンバの気持ち
☆Iさん
はやく走るためにどのようなアプローチで改良するかを考えていきました。直線とカーブどちらを重視するか、タッチセンサはどう使えるか、前輪と後輪の
バランスはどうか、まだまだ課題があります。
☆Hさん
ロボットをもう一台製作。説明を聞きながらも意外と難しい!昔は、プラモデルいっぱい作ったんだけどなぁ。一応何とか完成したか?
あとはうまく動いてくれれば・・っておいおい、ギアがついていないぞ!ハハハ。ハハ・・ハァ。
リーダーのつぶやき
いくつかのアプローチで作成したけど、不安定で速度が出せません。この調子で大丈夫なのか?こんな感じで作業してます。
みんなライントレース用紙の周りに集まって、じーっとロボットを見てます。

3/5(火)
今日の一句 「暗闇を 明るく照らす 救世主C」(字余り)
本日の作業予定
- 1.くるまの方向性を決める(その3)
- 2.言語の違いを確かめる。
- 3.楽しむ。
メンバの気持ち
☆Iさんの驚き
「方向性をきめる」が結局その3まで続いてしまってます。
ところで、Javaで開発しているとどうしても本体に転送している時間が気になります。
「Cだったら時間かからんのに」といって、リーダーはCでためしにやってみました。
はやかったです。ただの首ふりなのに。こうして私たちはJavaからCにチェンジしたのです。
☆Hさん
JAVAでの開発は行き詰まり、これ以上はお手上げかというところからC言語での開発を決行。
そしてJAVAとCでの実走行におけるあまりの違いに一同脱帽。目から鱗とはまさにこれか。
最初からC言語で開発していれば・・。 そんなことは、まぁいっか。
リーダーのつぶやき
初期に試そうと思って保留しておいたCとJavaでの速度比較を決行。
あまりの反応速度の差に唖然・・・。 今までの苦労はいったい・・・。
シンプルなものでも全然速いです。 Javaはダメだ・・・
3/8(金)テスト走行
今日の一句「あきらめろ 試してみるには まだ早い」
今日は、第1回目の試走日でした。
しかし、チーム WITH
のロボットは、まだ万全とは言えません。
どうするんだろう?
と思っていたら、アドバイザから、一通のメールが、
「今週はパスすることにし、来週参加します。」
そういうわけで、東京行きはあきらめました・・・。
リーダーのつぶやき
まだ、タイムを計って、競える状態じゃないよー。
当日の様子
やっぱり、参加チームは少なかったみたいです。説明会とも重なっていたから、
そっちに行った人が多かったんじゃないかなー。
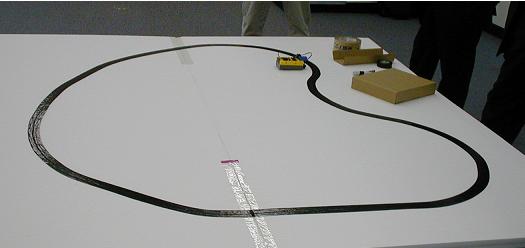
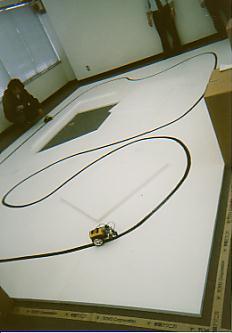
試走のコース
今日は、第1回目の試走ということで、当日の6分の1のコースが用意されていました。
発砲スチロールにビニールテープで描かれた曲線、これがコースです。
6分の1で、畳2枚の大きさです。本番コースがいかに大きいか・・・
今、走っているのが、ショートトラックの規定ロボット。

これは、上と反対側から撮ったもの。置いてあるのは、ロボットの心臓、RCXです。
3/11(月)ホームページ公開!
今日の一句「目の前の 敵は時計か 崩壊か」
本日の作業予定
- 1.Cに乗り換える。
- 2.Cひとすじになる。
- 3.楽しむ。
メンバの気持ち
☆Iさん
先週までのJavaではおそいのでCで開発することになりました。
開発は1つのパソコンだけで、みんなで考えようということです。
きっと先週リーダーが開発環境のことで悩んでいたからでしょう。
前までと比べると動きがスムーズですが、たまにコースをはずれるのでスピードに
どこまでたえられるのか探しています。
☆Hさん
さあ、これからは速さと安定を求めて旅路をいこう!これぞ男のロマン!
最速の男になるためにはクラッシュも辞さない!?
地道な計測が最高の走りを生む!
リーダーのつぶやき
かっこいーアルゴリズムを作りたいのに、考えれば考えるほどシンプルに。
他のチームはどんな戦法で来るんでしょうか?
3/12(火)
今日の一句「どっちの プログラムショー 始まるよ」(字足らず)
本日の作業予定
- 1.速さと安定の板ばさみになる。
- 2.Cについていく決心をする。
- 3.楽しむ。
メンバの気持ち
☆I さん
シンプルな制御で走らせたものとブレーキや減速を使ったものと、どちらがどう早いのかよくわかりません。ということで性能テストをしましたが、同じ制御でもタイヤの状態や電池の具合によって微妙に変わってきます。あと、コースアウトしたときの制御を考えているけど、うまいこと思いつかないです。 これを試すためにコースアウトさせようと車を手でおしたら、横転してこわれそうになりました。
☆Hさん
二つの方向性を持つプログラムが浮上する。さらなる速さを求められるのは一体どちらなんだろう。 当たるも八卦、当たらぬも八卦!?極める事は容易ではない。しかし前に進まなければ。時間は待ってはくれない・・。
☆Kさん
スピード調整等の細かな設定を「あーでもない」「こーでもない」と行い、
テストコースでのタイム測定。
コースを外れてパスファインダーがクラッシュ。
大笑い」 という作業をもくもくと繰り返し行う.
どうしても環境によって動作が不安定になってしまう.
本番のコース状況はどんなんだろう? とても心配になってきた・・・
リーダーのつぶやき
こんなにシンプルだと、かっこいーモデルが描けない!
ていうか、テスト走行バージョンがまだ完成しません。 うーむ…
企画・運営チームの会場下見
今日は、プロデューサーが、ロボコンのCTOと一緒に、会場の下見に行ってきました。
東京ファッションタウンTFTホールは、早春の日差しをあびていました。

ロボコン会場の東京ファッションタウンTFTホールの周辺風景

会場から一番近い、ゆりかもめ 国際展示場正門駅

東京ファッションタウンTFTホール

ホール内、吹き抜けの上から降ってくるシャワー

ロボコン会場 : 嵐の前の静けさ
3/13(水)
今日の一句「闘いの カギを握るは 電池かな」
今日は、リーダーとHさんの二人で、大量の電池を手に、ばんばん練習走行させています。
本日の目標
- 1.素早い電池交換技術を身につける。
- 2.電池マスターになる。
- 3.楽しむ。
メンバの気持ち
☆Kさん
リーダーと二人でひたすら、電池とにらめっこ。 実は、けっこう楽しかったりする?
リーダーのつぶやき
電池、いったいいくつ使うんだろう・・・
3/15(金)テスト走行
今日の一句「恐るべし 飛び散る火花に 唖然とす」
そして、試走日がやってきました。
先週は、まだ走らせるには、完成度が低いということで参加しませんでしたが、今回は、違います。
リーダーは崇高な目標を胸に秘め、テスト走行へと向かいました。
本日の目標
- 1.どのチームよりも早く、どのチームよりもかっこよく、試走会場に現れること!
- 2.そして、ロボットを走らせる。
メンバの心意気
☆Kさん
ぶっちぎっちゃえー!
☆アドバイザ
指令 : みんなをびびらせろ。
リーダーのつぶやき
25秒は切らないとだめだな。
注:チーム WITH は、午前の部だったため、この後、午後の部で、どこかのチームがぶっちぎりの21秒台を出したことは知りません・・・。
リーダー:試走の感想
発砲スチロールは予想よりもグリップが低かった。個人的には助かる。
午前中はタイムがトップクラスだったので、安心して帰ったら、午後は圧倒的に速いタイムが出たらしい。
うっわー、たくさん手を入れないとダメかもしんない。
テスト走行の様子
各チーム、本番さながら、真剣な面持ちで、ロボットを見つめます。
調整と走行を繰返し、速いタイムが出ると、どよめきが。
その様子は、まるでF1のようでした。
CTOとその仲間たちが用意した、当日と同じ大きさのコース。
ラインが引かれているのは、アウトコースです。
畳12枚分で、かなり長いコースになっています。
カーブがポイント。
 うちのロボットは、うまく走れるかなー。
うちのロボットは、うまく走れるかなー。
 どんな感じですか?
どんな感じですか?
 いやー、なかなか難しいねー。
いやー、なかなか難しいねー。
3/18(月)
今日の一句「フロンティア 未開拓なら 橋架ける」
テスト走行で、厳しい闘いになることは必至であることを感じたリーダー。
さて、本番まで、あと1週間ほどです。チームWITH はどういう作戦をとるのでしょうか。
本日の目標
- 1.速く、速く、誰よりも速く。
- 2.コースアウトにもひるまず、突き進む。
- 3.楽しむ。
メンバの気持ち
☆Hさん
今日は、発想の大転換ともいうべき、プログラムの糸口を見出した。
火事場のクソ力である。我々はおそらく未だ誰も通らぬ道を切り開く先駆者となる?
リーダーのつぶやき
面白いロジック、思い付いちゃった。うしし。(^o^)/~~
3/19(火)
今日の一句「人柱 わが身を削り 奇をてらう」
気づいてみれば、明日は、コンセプトシートとモデル図の提出〆切です。
なんたること! コンセプトシートは全く手付かずの状態・・・。
あせって、郵便局に速達の問い合わせをしたり、字のきれいな人を探したり、ロボットを動かしている場合ではない一日でした。
本日の目標
- 1.コンセプトシートを仕上げる。
- 2.なんとか、〆切に間に合わせるよう、じたばたあがく。
- 3.楽しむ余裕はない・・
メンバの気持ち
☆Hさん
いよいよ作業も大詰め。最終段階に入った。今日は、橋の落成式。
しかし、橋は、崩壊した。再び、橋は架かるのだろうか・・・。
リーダーという「人柱」が支えとなる。
リーダーのつぶやき
コンセプトシートなんて、すっかり忘れてたー。どうしよう・・・。
そうだ! 後輩の○○さんに書いてもらおーっと。色鉛筆もあるし。
今日は、一日、締め切りを気にしてばたばたしてるうちに終わっちゃった。
3/20(水)提出物〆切り日
今日の一句「心配は ロボットだけじゃ なかったの・・・」
リーダーは、一人で黙々と最後の追い込みをしています。お休みをはさんで、明後日は、3回目の試走日ですから。
2パターン考えているようで、あーでもない、こーでもないと頭をひねっています。 それから、昨日の夜、郵便局へ直接持っていったコンセプトシートとモデル図は
果たして〆切りに間に合うのか・・。心配ごとがたくさんの一日でした。
本日の目標
- 1.コンセプトシートが間に合うか心配する。
- 2.美しいプログラミングに近づける。
- 3.じたばたする。
リーダーのつぶやき
ほんとに、間に合うのかなぁ・・・。試走すらあやしかったりして・・・。
3/22(金)
今日の一句「削るのは しのぎかメンバか ロボットか」
第3回目の試走日。本番と同じコースを使って、その場で調整できるのも、これが最後です。テスト走行速報(リーダーより)
発泡スチロールコースの劣化からか、スピードがダウンしてます。
一度、前までのロジックで、20"87が出ましたが、ほぼコースアウト
しそうな気配で使えません(-_-;
また、コースのラインがガタガタなのか、コース自身の影響なのか、
コーナー判定が成功しません。
これはセッティング不可能な感じなので、ショートカットは無理な気配です。
困ったなーって感じ。
テスト走行の感想(リーダー)
どこのチームも苦しんでいて、今のままだと23秒を切るあたりが優勝タイムに
なりそうです。
今日の参考タイムは、23"53でした。
マシンが好調なときに、20秒台のスーパーラップが出ましたが、
まぼろしだったようなので、本番はモーターを取り替えてチャレンジしてみようと思います。
注:コンテストで優勝した IIMMC チームのタイムは、なんと、22.9! リーダーの予想は見事に的中でした。
第3回 テスト走行の様子
本日のコース
インコース、アウトコース、両方のラインが引かれています。

チーム WITH のリーダーも見えます。

背中合わせに本番用と同じ大きさのながーいコース

台の上にマシンが載せてあり、コースを走らせなくても、シミュレーションができる!

3/25(月)前日準備
今日の一句「今日こそは 主役で登場 運営チーム」
今日の日記は、運営チームが主役です!
なんといっても、前日準備は、運営チームの
活躍の場ですから。
コンテスト前日の慌しさをお届けします。
運営チーム、本日の目標
- 1.パネル掲示物を美しく貼る。
- 2.時間内に準備作業を完了する。
- 3.予想外の展開にどぎまぎする。
プロデューサーのつぶやき
準備が遅いぞー、ディレクター、間に合うのかー?
ディレクター Y のつぶやき
あぁ、やっぱり間に合わなかったわ・・・。
明日も早起き・・・。
どうしましょう・・・。
準備の様子
パネルに各チームのコンセプトシートとモデル図を貼り出しているところ。

3/26(火)本番
今日の一句「ついに来た! 後は野となれ 山となれ」
いよいよ、UMLロボットコンテスト本番がやってきました!本日の目標
- 1.とにかく完走
- 2.そして、速く
- 3.さらに、上を目指す。
チーム WITH のモデル図はこちらです。
アドバイザからのコメント
賞は貰えませんでしたが、来場者投票では一番票を集めていました。
敗因としては、「振舞モデルに情報が不足」という部分でしょう。
今回の UML フォーラムでは、Executable UML,MDA(Model Driven Architecture)や、ツールからコードの自動生成に焦点があったこともあって、振舞モデルに情報が充実したモデルが,高得点を取ったようです。
残念(;_;)
投票は、レゴブロックで
「あなたの1票が、参加チームの強い味方です! 」
を合言葉に、今回は、レゴブロックで、審査員、参加者、来場者に投票してもらう形式をとりました。各チームの掲示物と共に、レゴブロック用のグレーのプレートがあり、そこに、レゴブロックをくっつけます。
来場者は、赤、青、黄の小さなレゴブロックを1人1つ。
競技参加チームは、1チームにつき、黒のレゴブロックを4つ。
審査員は、大きなレゴブロックを、1人4つ。

3/27(水)表彰式
今日の一句「喜びは 副賞と共に やってくる」
ロボコンで、優秀な成績を収めたチームの表彰式です。
プレゼンターは、審査員のレオン・スター氏、Sato Jin 氏、
そして、OMG会長のリチャード・ソーリー氏。
なんとも、豪華なメンバーでの表彰式となりました。
表彰式の様子
ショートトラック、タイム1位の IIMMC チーム。
タイムは、22.9 秒。レース中に、周囲から「はやーい。」の声が出るほどでした。

Copyright2002 EIWA SYSTEM MANAGEMENT, INC. All Rights Reserved.


