2017年3月1日
- EV3ソフトウェア
- EV3技術情報
- TETRIX技術情報
- ソフトウェア
- ソフトウェア
TETRIXをEV3ソフトウェアで動かすには-連続回転サーボモータを動かす
EV3ソフトウェアでTETRIXの連続回転サーボモーターを動かす方法を紹介します。

ここで紹介する内容は、仕様変更前のサーボモーターコントローラー(商品型番:PI-W34302)を使用したものです。
仕様変更後のTETRIX MAX Servo Motor Expansion Controller(商品型番:PI-W44355)を使用する場合はこちらをご覧ください。
仕様変更前後の製品についてはこちらをご覧ください。
なお、EV3ソフトウェアにTETRIX用のプログラミングブロックを追加していない場合は、こちらから追加してください。
 EV3ソフトウェアには、TETRIXの連続回転サーボモーター専用のプログラミングブロックやモードがありません。「HiTechnic Servo Controller for TETRIX」ブロックの180度サーボモーターを動かすモードを使います。
EV3ソフトウェアには、TETRIXの連続回転サーボモーター専用のプログラミングブロックやモードがありません。「HiTechnic Servo Controller for TETRIX」ブロックの180度サーボモーターを動かすモードを使います。
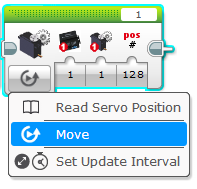 連続回転サーボモーターを回転させるには、「HiTechnic Servo Controller for TETRIX」ブロックの「Move」モードを選択します。
Moveモードの各パラメータは以下のとおりです。
連続回転サーボモーターを回転させるには、「HiTechnic Servo Controller for TETRIX」ブロックの「Move」モードを選択します。
Moveモードの各パラメータは以下のとおりです。
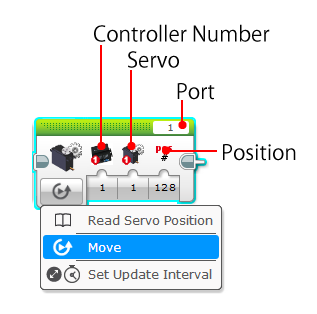
| Port | TETRIXのモーターコントローラーが接続されているEV3のセンサーポートの番号を選択します。 |
| Controller Number | EV3からみて、何番目のモーターコントローラーに接続されているサーボモーターを制御するかを選択します。 |
| Servo | サーボモータコントローラーの、どのチャンネルに接続されているサーボモーターを制御するかを選択します。 |
| Position | サーボモーターの回転速度(パワー)を指定します。
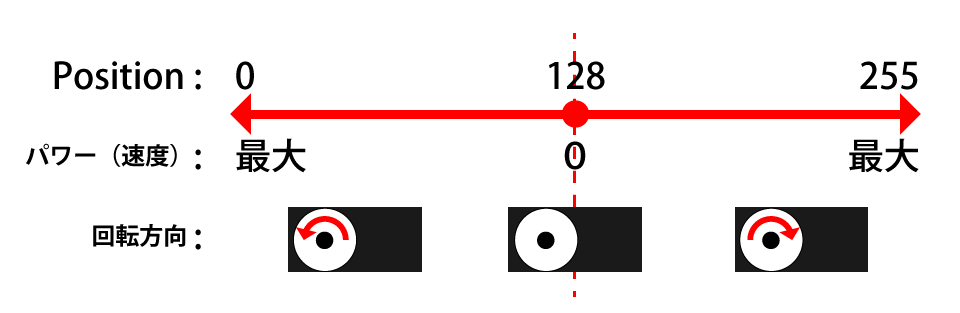
0~255の範囲で指定します。
Positionは、128を指定すると回転速度が「0」になります。128を境に、それより小さいほどマイナス方向に回転速度が上がり、それより大きいほどプラス方向に回転速度が上がります。
 |
 次のようにパラメータを設定します。
次のようにパラメータを設定します。
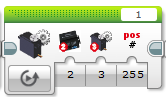 下図のプログラムは、連続サーボモーターをプラス方向に最大のパワーで5秒間回転させ停止させます。
下図のプログラムは、連続サーボモーターをプラス方向に最大のパワーで5秒間回転させ停止させます。
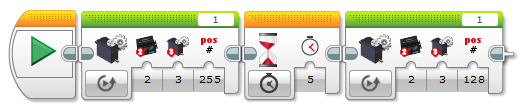 「HiTechnic Servo Controller for TETRIX」ブロックで連続回転サーボモーターを回転させた場合、プログラムが終了しても連続回転サーボモーターは回転し続けます。そのため、プログラムの中で連続回転サーボモーターを停止させる必要があります。
「HiTechnic Servo Controller for TETRIX」ブロックで連続回転サーボモーターを回転させた場合、プログラムが終了しても連続回転サーボモーターは回転し続けます。そのため、プログラムの中で連続回転サーボモーターを停止させる必要があります。
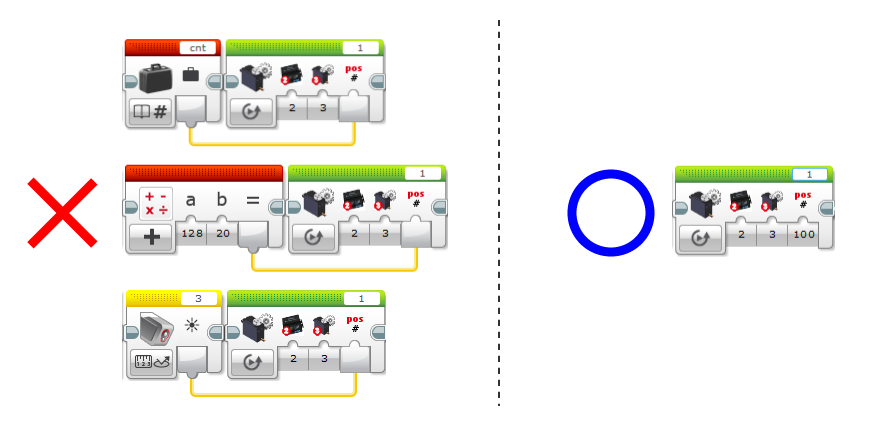
また、「HiTechnic Servo Controller for TETRIX」ブロックで連続回転サーボモーターを回転させるとき、Positionの値を変数ブロックや数学ブロックなどから代入すると、正常に動作しない場合があります。 Positionには、直接数値を入力するようにします。
(2018/03/27現在)