2018年4月3日
- EV3ソフトウェア
- EV3技術情報
- TETRIX技術情報
- ソフトウェア
- ソフトウェア
(新)TETRIXをEV3ソフトウェアで動かすには-環境設定手順(2018/1~)
TETRIXをEV3ソフトウェアで動かすためには、TETRIX用のプログラミングブロックを追加する必要があります。
手順は以下のとおりです。

なおここで紹介する内容は、仕様変更後(左図)のTETRIX MAX Servo Motor Expansion Controller(商品型番:PI-W44355)、TETRIX MAX DC Motor Expansion Controller(商品型番:PI-W44354)、TETRIX TorqueNADOモーター(商品型番:PI-W44260)を使用する場合の手順です。
仕様変更前のサーボモーターコントローラー(商品型番:PI-W34302)、DCモーターコントローラー(商品型番:PI-W34303)、DCギアモーター(商品型番:PI-W39530)を使用する場合は、こちらをご覧ください。
仕様変更前後の製品についてはこちらをご覧ください。
また、仕様変更前と仕様変更後のプログラミングブロックを共存させることができませんので、左図の仕様変更前のプログラミングブロックが追加されている場合は、こちらの手順に沿って、仕様変更前のプログラミングブロックを削除してから、以下の手順に進んでください。
1)TETRIX用のプログラミングブロックをダウンロードします。
以下のURLにアクセスし、「TETRIX Expansion Controller EV3 Blocks」をクリックして、TETRIX用のプログラミングブロックをダウンロードします。
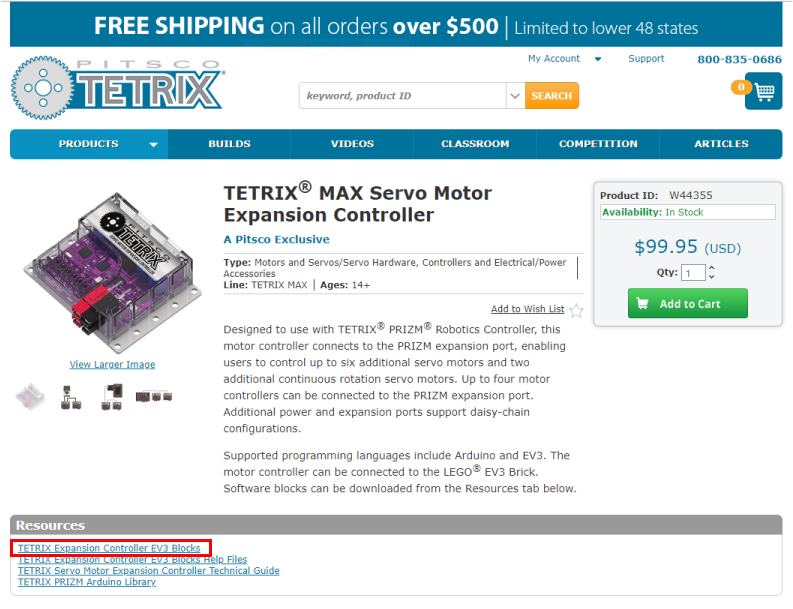
https://www.tetrixrobotics.com/TETRIX-MAX-DC-Motor-Expansion-Controller
ダウンロードしたzipファイルは、任意の場所に解凍してください。
2)TETRIX用のプログラミングブロックをEV3ソフトウェアに追加します。
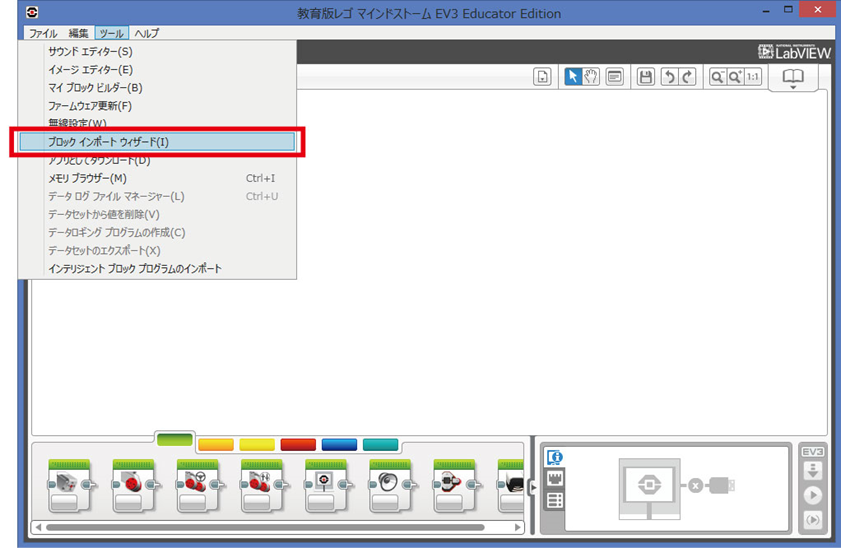
EV3ソフトウェアを開き、プログラム作成画面を開きます。ツールメニューから「ブロック インポート ウィザード」を選択してください。
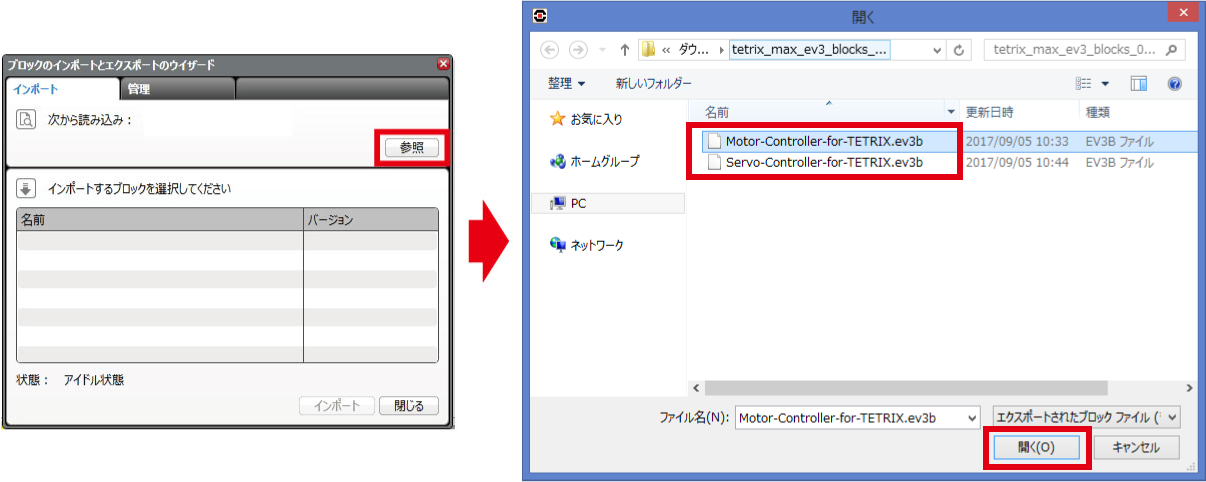
参照ボタンをクリックし、1)でダウンロードして解凍したフォルダの中の「EV3_TETRIX_Blocks」フォルダ内にある「Motor-Controller-for-TETRIX.ev3b」または「Servo-Controller-for-TETRIX.ev3b」を選択して「開く」ボタンをクリックします。
「Controller-for-TETRIX.ev3b」を選び「インポート」ボタンをクリックします。「この変更を有効化…」というメッセージは「OK」をクリックします。
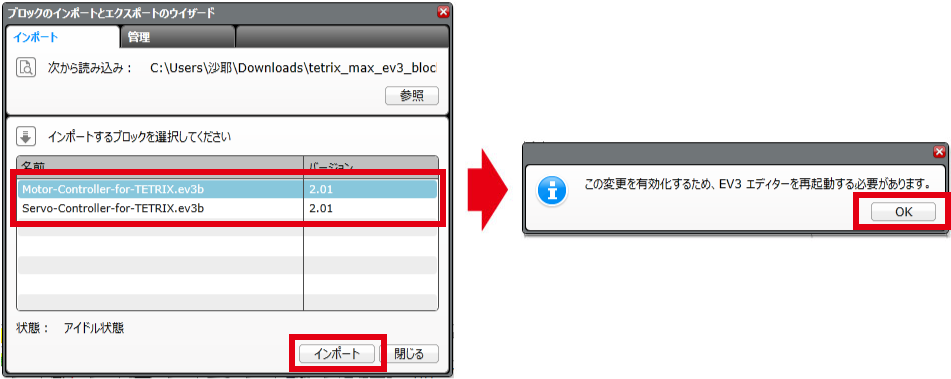
同じように「Servo-Controller-for-TETRIX.ev3b」も選んで「インポート」ボタンをクリックします。
3)EV3ソフトウェアを一旦閉じて、開きなおします。

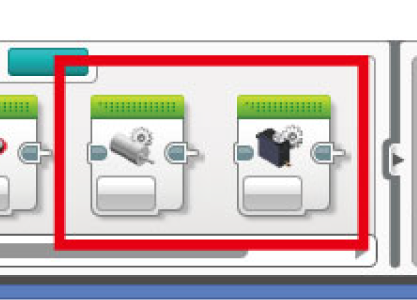
下図のように、動作パレットにTETRIX用のプログラミングブロックが2つ追加されていれば、設定は完了です。
(2018/03/23現在)