2016年2月10日
- EV3ソフトウェア
- EV3技術情報
- ソフトウェア
教育版EV3 ソフトウェアにおけるコンパスセンサーの使い方
◆動作環境
■ハードウェア
・教育版レゴ マインドストームEV3
・HiTechnic社製 コンパスセンサー (Compass Sensor)
■ソフトウェア
・教育版EV3 ソフトウェア
※HiTechnic社製のコンパスセンサーブロックのインストールが必要です。
◆コンパスセンサーとは
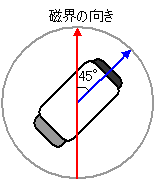
■HiTechnic社製 コンパスセンサーは、地球の磁場を検出するセンサーです。
■センサーの検出する値は0~359度です。値が一定の範囲(トリガーポイント)に入っているか判別することもできます。
■EV3の入力ポートに標準のケーブルで接続して使用します。

◆コンパスセンサーブロック
コンパスセンサーブロックは、地球の磁場を検出するブロックです。
ブロックのモードは2種類あります。
■測定モード
地球の磁場を測定するモードです。
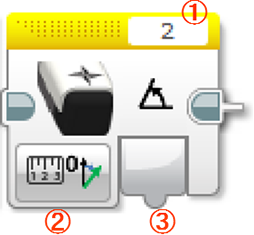
①センサーを接続する入力ポート
②モード
「Absolute Heading」・・・絶対値モード
(絶対的な角度で比較を行います)
「Relative Heading」・・・相対値モード
(相対的な角度で比較を行います)
③センサーから読み取られた値
絶対値モードの場合:絶対的な角度( 0 ~ 359度)
相対値モードの場合:④の角度との差(-179 ~ 180度)
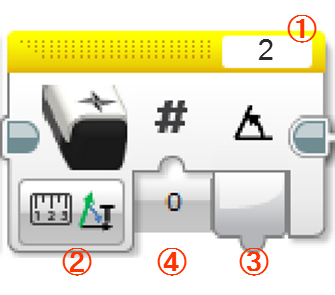
④目標とする角度(0 ~ 359度)
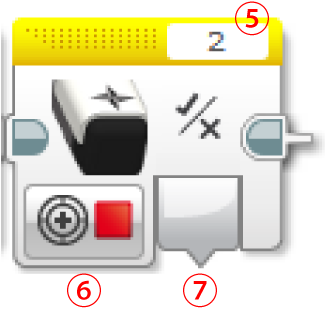
■Calibrateモード
センサーをキャリブレーションするモードです。

⑤センサーを接続する入力ポート
⑥モード
「Calibrate Start」…キャリブレーションを開始
「Calibrate Stop」…キャリブレーションを終了
⑦Success
キャリブレーションの結果(真偽値)
センサーが磁気の影響を受け、値を正しく検出できなくなった場合、キャリブレーションを実施してずれを補正します。(正常に測定できている場合は必要ありません。)キャリブレーションをスタートさせてから、約20秒の間にセンサーを1.5~2回転させて、キャリブレーションを終了してください。センサーはEV3やEV3のモーターから10~15cmほど離して取り付けてください。
※Calibrateモードは、バージョン0.3のプログラミングブロックから追加されたモードです。
※プログラミングブロックのバージョンは、EV3ソフトウェアの「ツール」→「ブロックインポートウィザード」の中の「管理」タブで確認できます。プログラミングブロックを最新バージョンにするには、こちらの手順にしたがって、プログラミングブロックを再インストールしてください。
◆サンプルプログラム(ViewCompass.ev3)
■コンパスセンサーの値を表示するサンプルプログラム
教育版EV3ソフトウェアで動きます。
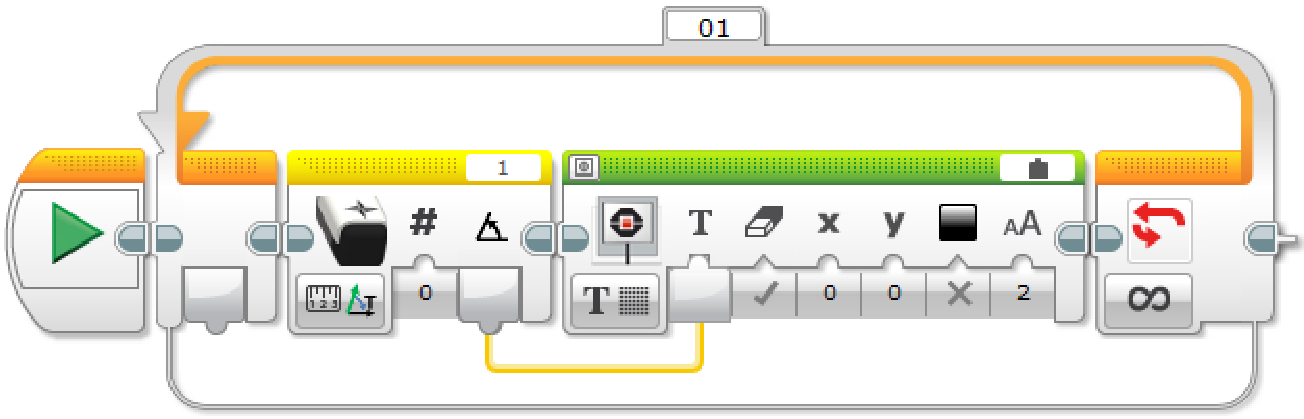

■サンプルプログラムの実行
コンパスセンサーは1番の入力ポートにつなぎます。
プログラムを実行するとセンサーが磁場の向きをとらえます。
たとえば、図のような向きにセンサーがある場合、EV3の液晶ディスプレイ(LCD)には次のように表示されます。