2015年9月25日
- EV3モーター
- EV3技術情報
- ハードウェア
EV3モーターの使用例
EV3 Lモーターの使用例(オンブロックプログラミング)
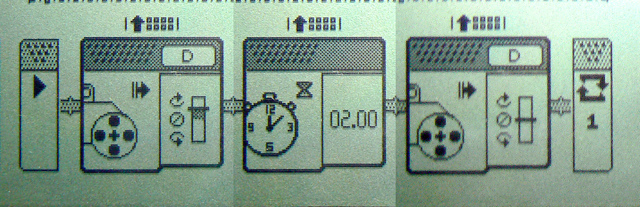
オンブロックプログラミングによるEV3 Lモーターの使用例を紹介します。
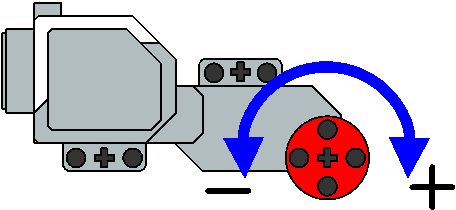
「出力ポートDに接続したEV3 Lモーターを2秒間だけ正転させる」というプログラムです。
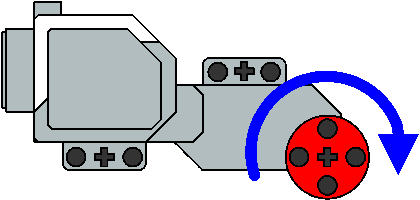
プログラムを実行すると、EV3 Lモーターが図の回転方向に2秒間だけ回転します。
モーターが停止すると、プログラムを終了します。
EV3 Lモーターの使用例(教育版EV3ソフトウェア 例1)
教育版EV3ソフトウェアによるEV3 Lモーターの使用例を紹介します。
「出力ポートDに接続したEV3 Lモーターを回転させる」というプログラムです。
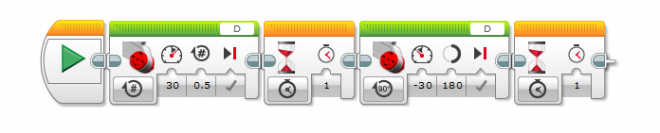
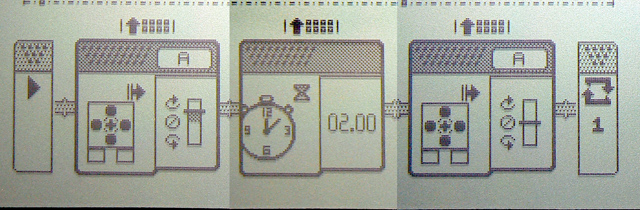
「Lモーター」「待機」のブロックを2組(計4個)使用します。「Lモーター」の設定内容は次のとおりです。
・「モード:回転数」「パワー:30」「0.5回転」「ブレーキ:あり」 ・「モード:角度」「パワー:-30」「180度」「ブレーキ:あり」 ここでは、あえて別々のモードを使っていますが、「0.5回転」と「180回転」では回転する角度が同じです。
プログラムを実行すると、EV3 Lモーターが次の動作を行います。
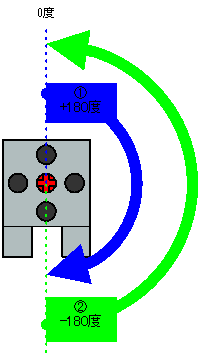
(1)時計回りに180度回転。 (2)1秒停止。 (3)反時計回りに180度回転。 (4)1秒停止。
EV3 Lモーターの使用例(教育版EV3ソフトウェア 例2)
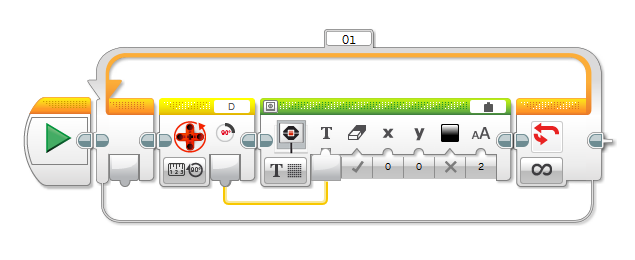
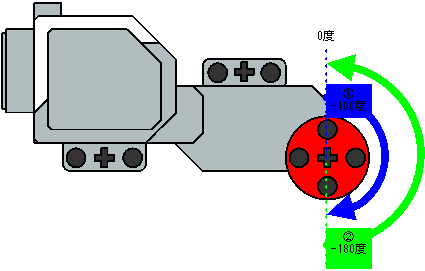
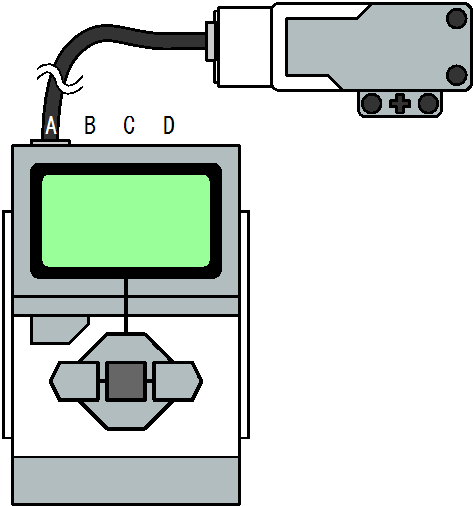
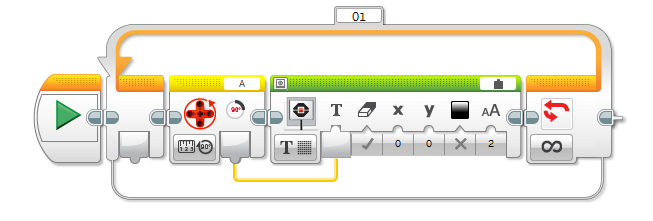
教育版EV3ソフトウェアによるEV3 Lモーターを使って、「出力ポートDに接続したEV3 Lモーターの角度を検出する」というプログラムです。
「ループ」「Lモーター」「表示」ブロックを使用します。「Lモーター」のモードは「測定-角度」に設定します。
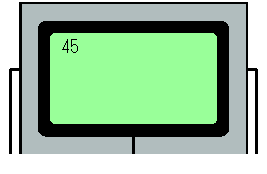
プログラムを実行すると、モーターの回転軸の角度がインテリジェントブロックEV3の画面に表示されます。
プログラムの実行直後が「0度」となります。
たとえば、時計方向に45度回転させると、「45」と表示されます。
EV3 Mモーターの使用例(オンブロックプログラミング)
オンブロックプログラミングによるEV3 Mモーターの使用例を紹介します。
「出力ポートAに接続したEV3 Mモーターを2秒間だけ正転させる」というプログラムです。
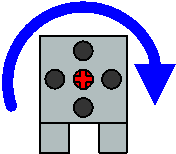
プログラムを実行すると、EV3 Mモーターが図の方向に2秒間回転して、その後、停止します。
EV3 Mモーターの使用例(教育版EV3ソフトウェア 例1)

教育版EV3ソフトウェアによるEV3 Mモーターの使用例を紹介します。
「出力ポートAに接続したEV3 Mモーターを回転させる」というプログラムです。
「Mモーター」「待機」というブロックを2組ずつ使用します。
2つの「Mモーター」ブロックにはそれぞれ次のように設定します。
・「モード:回転数」「パワー:30」「0.5回転」「ブレーキ:あり」 ・「モード:角度」「パワー:-30」「180度」「ブレーキ:あり」 ここでは、あえて別々のモードを使っていますが、「0.5回転」と「180回転」では回転する角度が同じです。
プログラムを実行すると、EV3 Mモーターが次の動作を行います。
(1)時計回りに180度回転。 (2)1秒停止。 (3)反時計回りに180度回転。 (4)1秒停止。
EV3 Mモーターの使用例(教育版EV3ソフトウェア 例2)
教育版EV3ソフトウェアによるEV3 Mモーターを使って、「出力ポートAに接続したEV3 Mモーターの角度を検出する」というプログラムです。
「ループ」「Mモーター」「表示」ブロックを使用します。「Mモーター」のモードは「測定-角度」に設定します。
プログラムを実行すると、モーターの回転軸の角度がインテリジェントブロックEV3の画面に表示されます。
プログラムの実行直後が「0度」となります。たとえば、時計方向に45度回転させると、「45」と表示されます。