2025年12月26日
024-2.SPIKE-RT入門 第1回目 「C言語の標準ライブラリを使ってみる」
この記事では「レゴ エデュケーションSPIKEプライム(以下、SPIKE)」で動作する「SPIKE-RT」の使い方を紹介します。
ここではアフレルが販売している教材「レゴ エデュケーションSPIKEプライム C言語プログラミングブック」で配布しているSPIKE-RTの開発環境を使っています。同製品の紹介ページは次の通りです。
https://afrel.co.jp/product/spike/c-language/
(文/松原拓也)
◆ 開発環境を準備する
Afrel Techブログでは2025年2月にSPIKE-RTを紹介しました。
https://afrel.co.jp/techblog/spike/024-1/
この記事ではラージハブのポートにラズベリーパイPicoを接続したりと、マニアックな内容でした。今回は仕切り直して、第1回目からのスタートとなります。
SPIKE-RTの主な特徴は「リアルタイムOS」であることです。リアルタイムOSなので、厳密に時間を管理した制御を行うことができます。SPIKE-RT自体は無償で入手することができます。SPIKE-RTの開発環境の対応OSはUbuntu(Linux)です。Windows搭載パソコンの場合、WSL(Windows Subsystem for Linux)という機能を使うと、Ubuntuを動かすことができます。
SPIKE-RTの開発環境を導入する方法については「C言語プログラミングブック」に書いてあるので、ここでは簡単に紹介します。
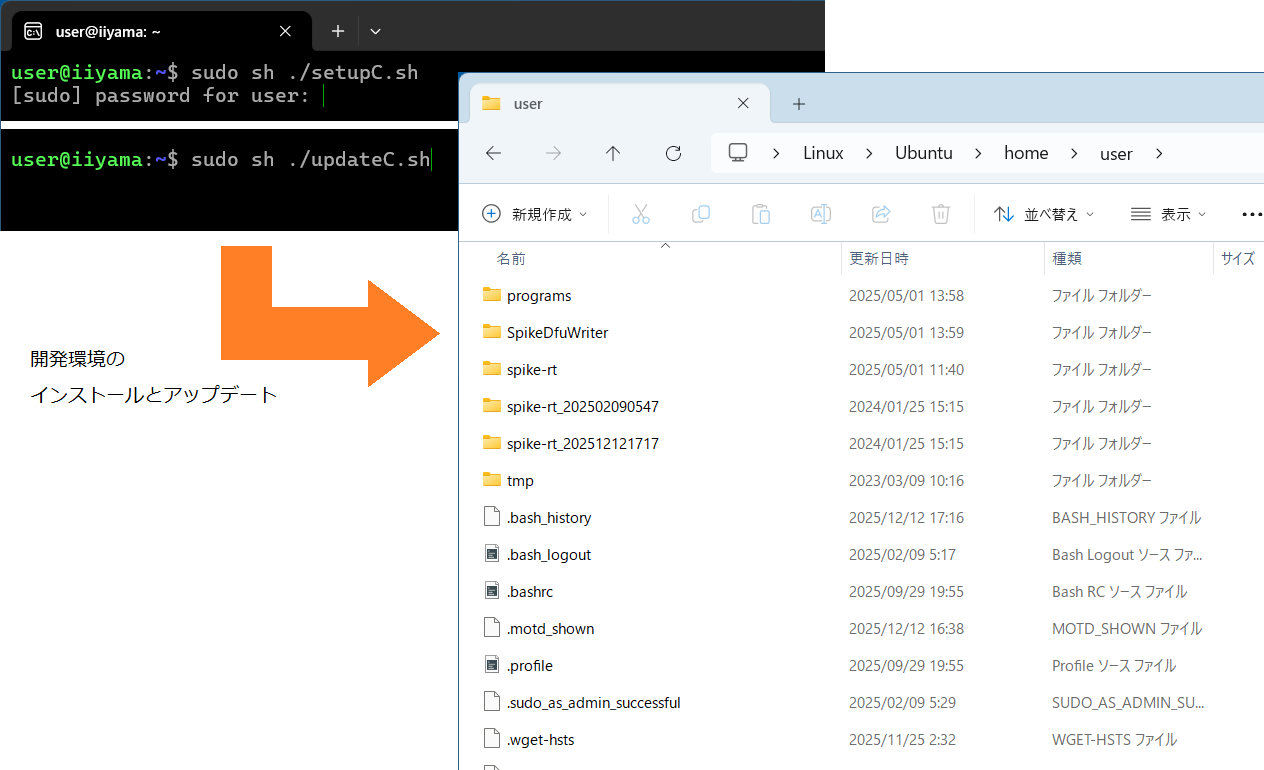
最初に「C言語プログラミングブック」に書いてある特設Webページからzipファイルをダウンロードして、展開します。 次にUbuntuを起動したら、「setupC.sh」スクリプトを実行して、ファイルを展開します。さらにDockerコンテナのダウンロードも行います。次に「updateC.sh」スクリプトを実行して、ファイルをアップデートします。この例ではユーザー名を「user」としたので、「home/user」フォルダ(ディレクトリ)の中に次のファイルが格納されます。
・「programs」フォルダ:ユーザーが作成中のプログラム。
・「SpikeDfuWriter」フォルダ:ファームウェアを書き込むためのツール。
・「spike-rt」フォルダ:SPIKE-RTのコンパイラやライブラリ。
・「spike-rt-(日付)」フォルダ:アップデート前のバックアップファイル。このフォルダの中身は使いません。
SPIKE-RT関連のスクリプトは次の通りです。
《開発環境の開始》
./start.sh
《プログラムの新規作成》
./create-program.sh [プログラム名]
《プログラムのビルド》
./build.sh [プログラム名]
《ファームウェアの書き込み》
./write.sh [プログラム名]
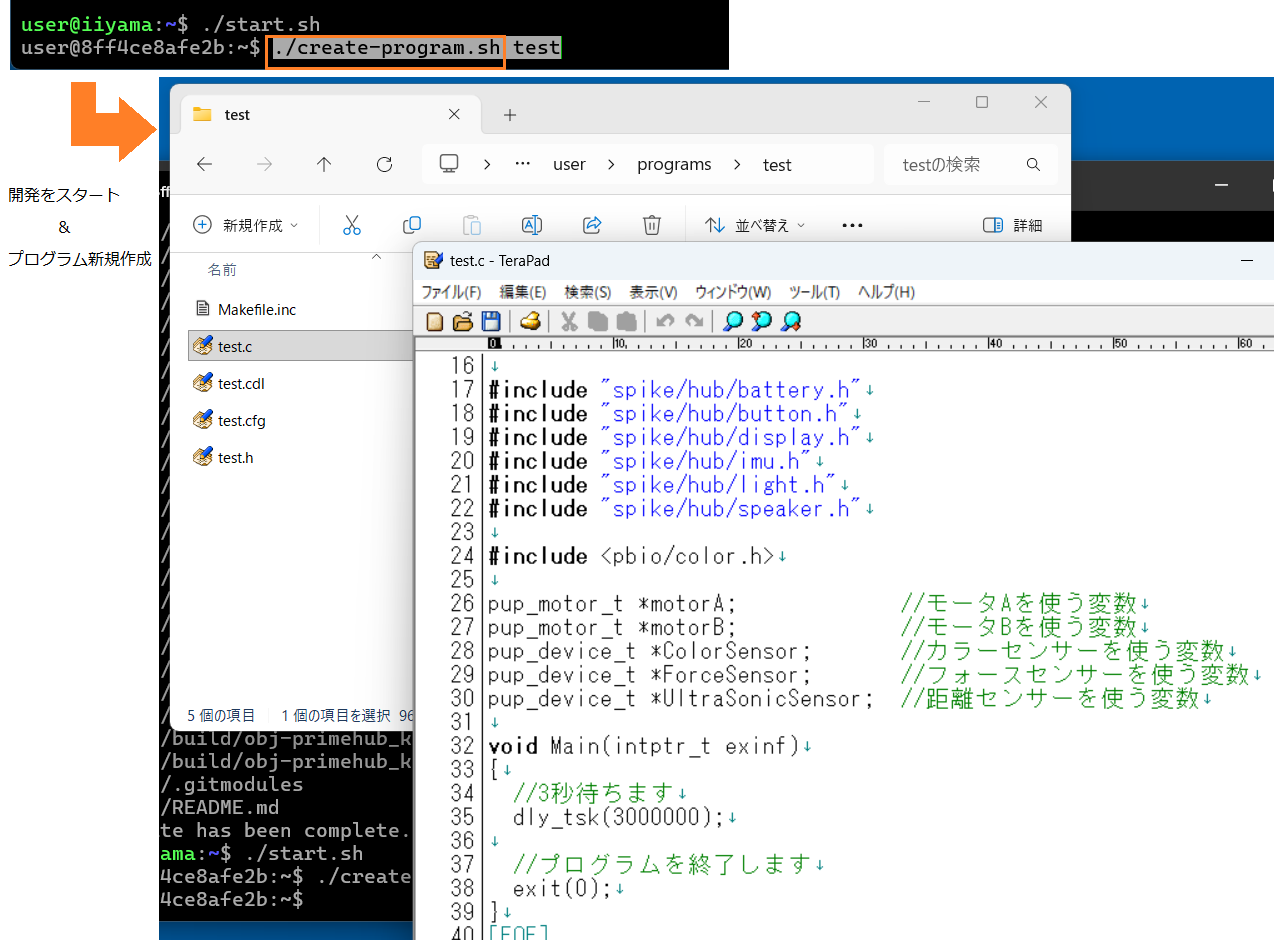
「create-program.sh」スクリプトを実行すると、プログラムを新規で作成することができます。例えば、プログラム名を「test」に設定した場合、「programs」フォルダの中に「test」フォルダが作られ、その中に「test.c」ファイルが生成されます。
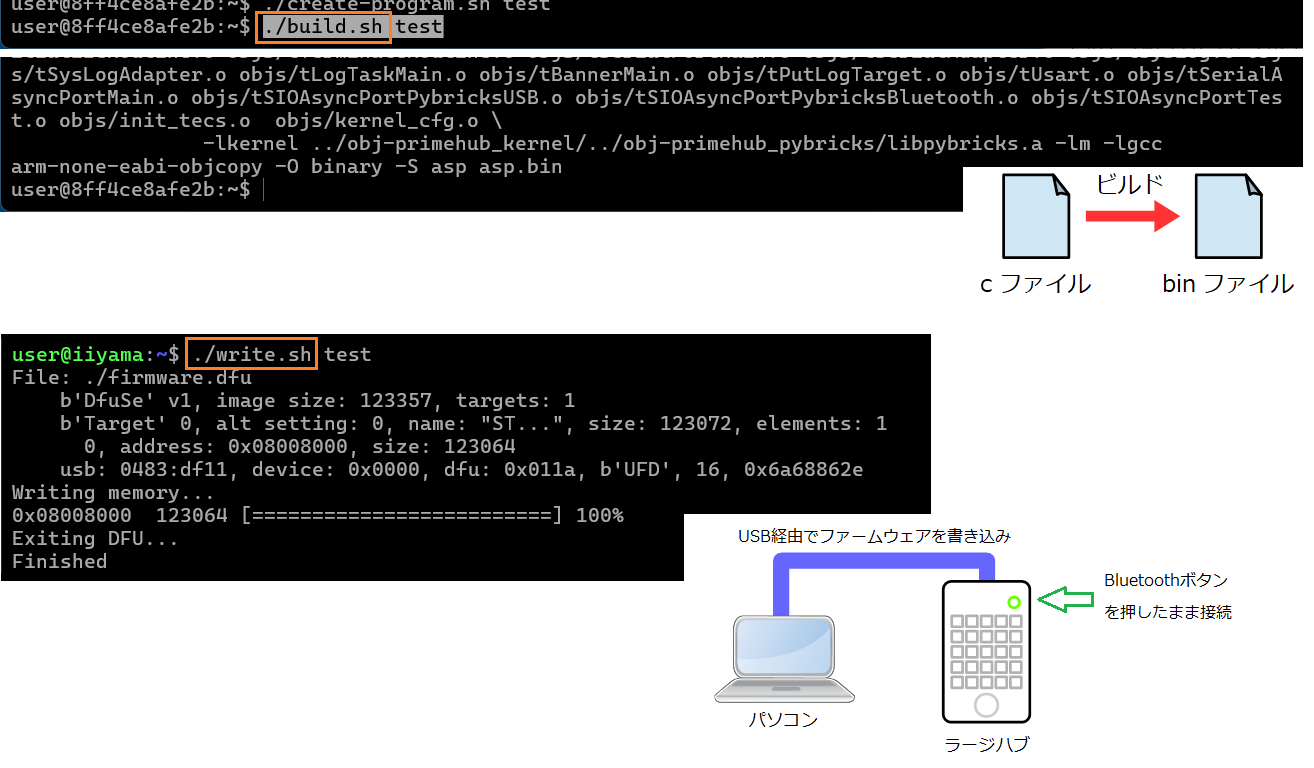
ビルドを行うには「build.sh」スクリプトを実行します。ビルドに成功すると、ファームウェア(asp.bin)が出来上がります。
ファームウェアを書き込むには、ラージハブのBluetoothボタンを押したまま、パソコンのUSBポートに接続します。Bluetoothボタンを5秒くらい押し続けていると、ファームウェアの書き込みモードになります(LEDがカラフルに点灯する)。接続した時、USBのデバイスドライバが「libusb-win32」である必要があります。デバイスドライバは「Zadig」というツールで変更することができます。
接続したら、「./write.sh」スクリプトを実行します。Dockerを動かしたままだと「not found」エラーが出てしまうので、別の画面でUbuntuを起動してスクリプトを実行します。
一度、SPIKE-RTのファームウェアを書き込むと、純正のファームウェア(ハブOS)は消えるので、以後、SPIKEアプリが使えなくなります。SPIKEアプリを使いたい場合には、「./write.sh spike-3」コマンドを実行して、純正のファームウェアに戻しましょう。
◆ 標準ライブラリを使う実験
C言語のメリットは様々なライブラリを使えることです。そこで、SPIKE-RTで「標準ライブラリ」が使えるのか実験してみました。標準ライブラリとは入出力や文字列操作や計算など基本的な機能を備えたライブラリのことです。
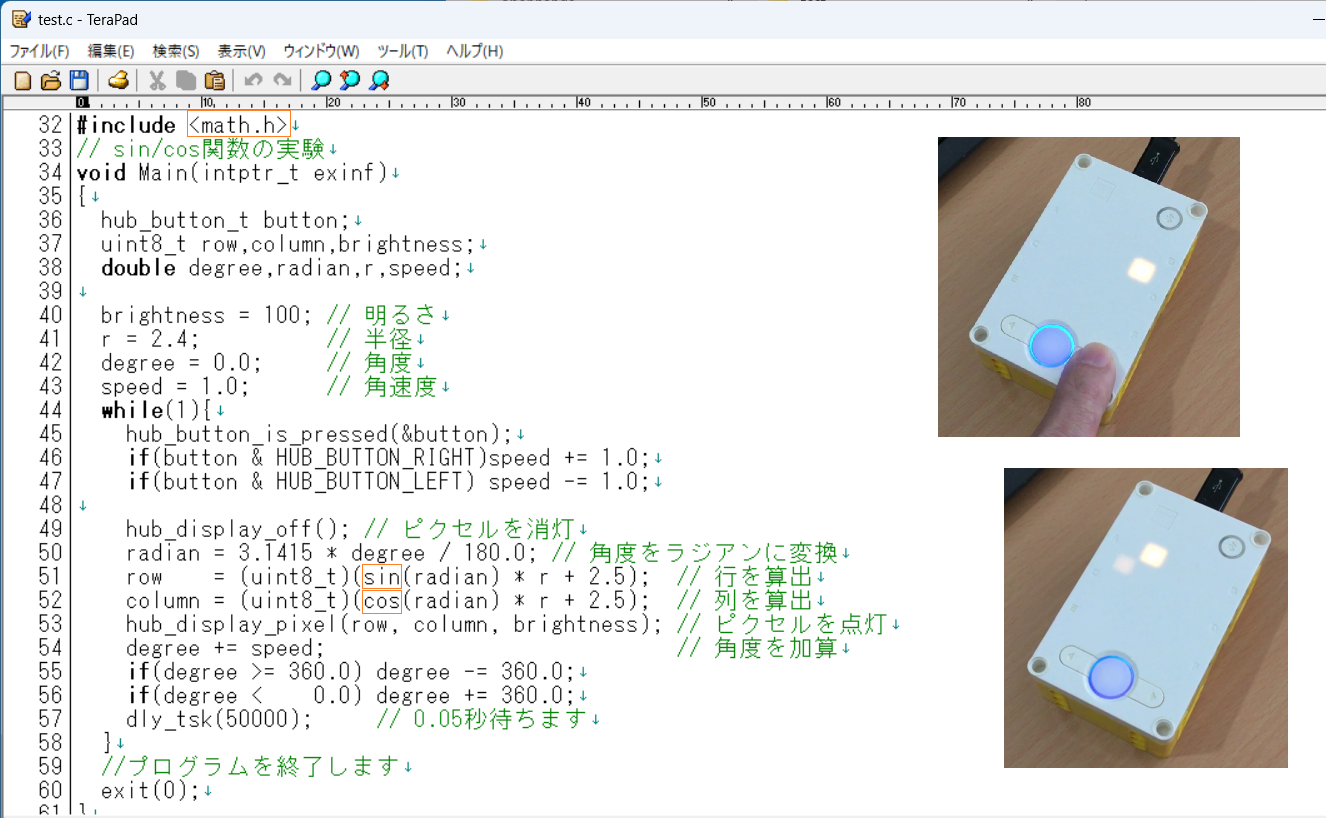
まずは三角関数(sin関数やcos関数)を使ってみます。三角関数を使うには、ヘッダファイルの「math.h」をインクルードします。sin/cos関数の引数はdouble型です。戻り値もdouble型です。
プログラムを実行すると、ライトマトリクスの点がぐるぐると回転して表示されます。ラージハブの左/右ボタンを押すと、回転する速度と方向を変えることができます。
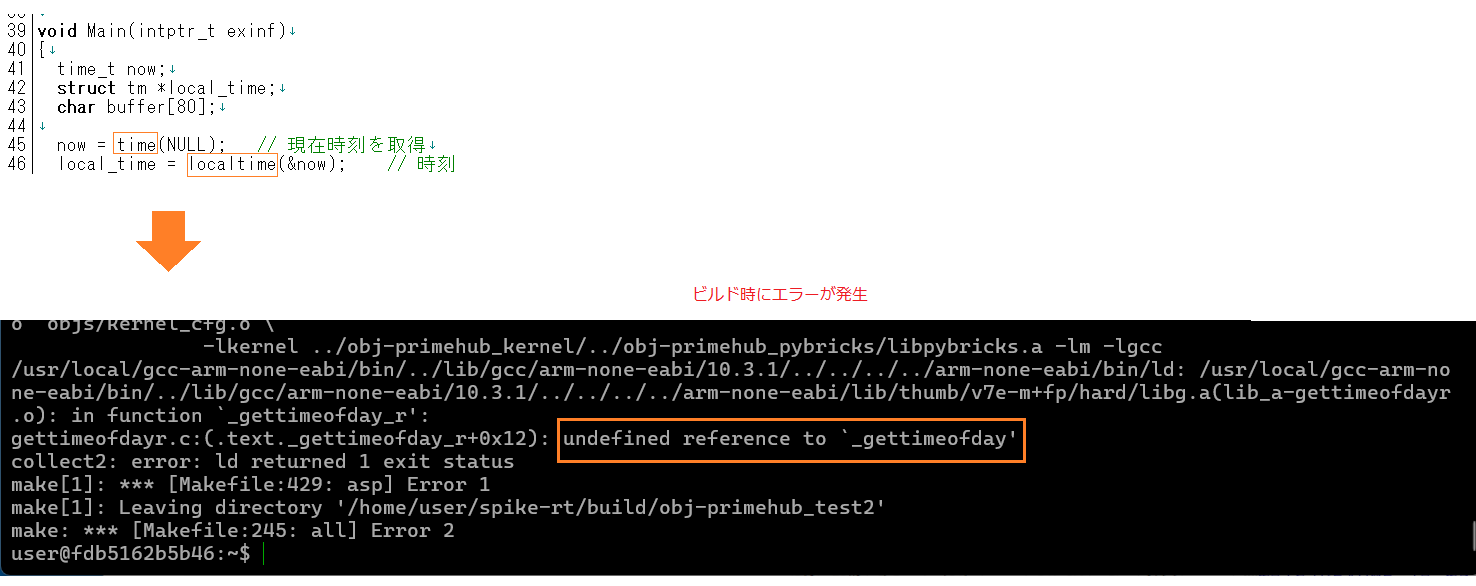
続いて、「time.h」をインクルードして、time関数やlocaltime関数が使えるかを実験してみました。time関数は時刻を取得する関数です。localtime関数は時刻をローカル時刻に変換する関数です。
ビルドすると、_gettimeofday関数が定義されていないというエラーが出てしまいました。time.hには対応していないようです。
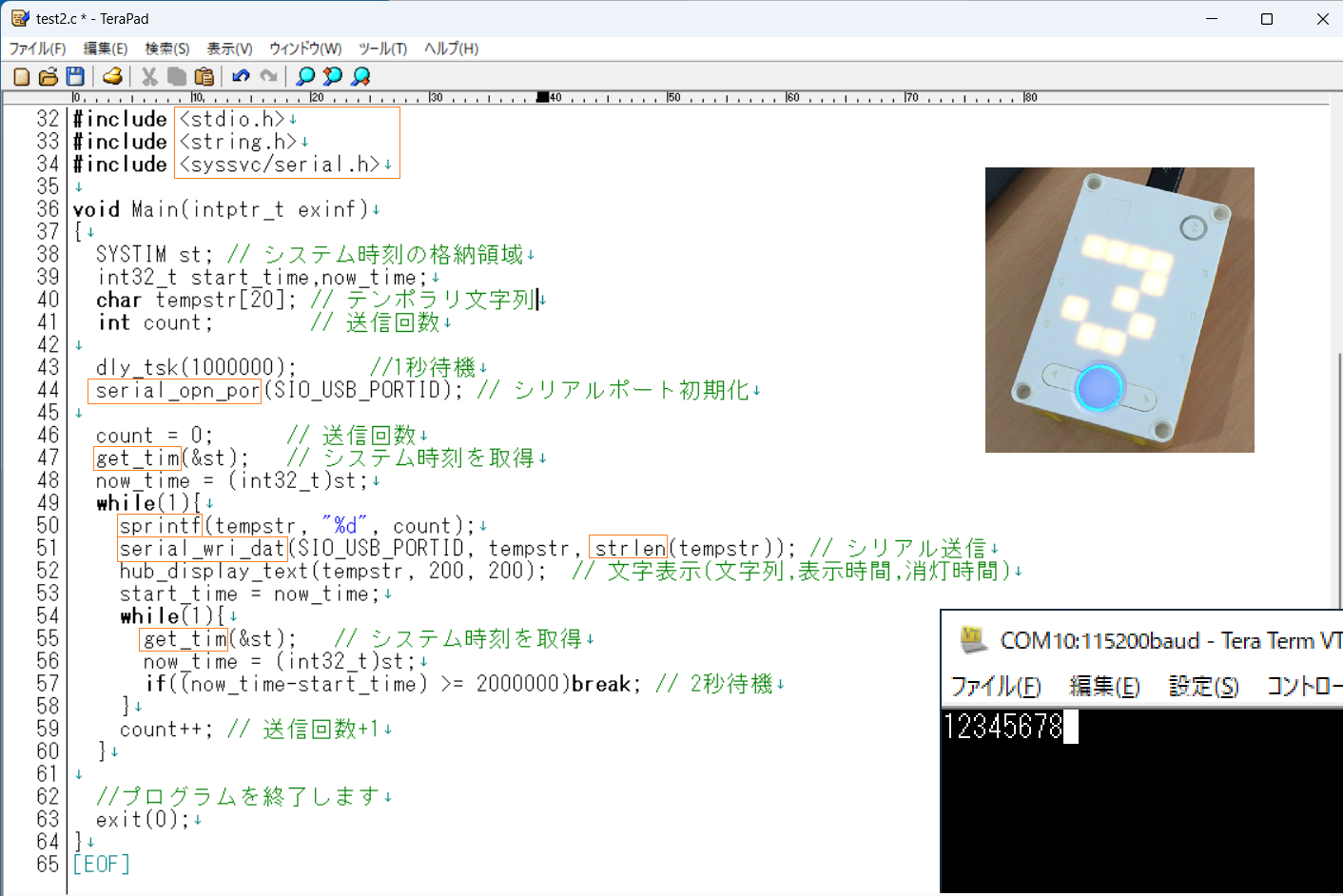
time関数の代わりに、get_tim関数を使ってみました。get_tim関数は起動してからのシステム時刻(単位はマイクロ秒)を取得する関数です。これは標準ライブラリではありません。
シリアル通信を行うにはserial_opn_por関数とserial_wri_dat関数を使います。そのままだと未定義のエラーが出てしまうので、「syssvc/serial.h」をインクルードしました。
数値を文字列に変換するのに標準ライブラリのsprintf関数(stdio.h)を使います。文字列から文字数を算出するのに標準ライブラリのstrlen関数(string.h)を使います。
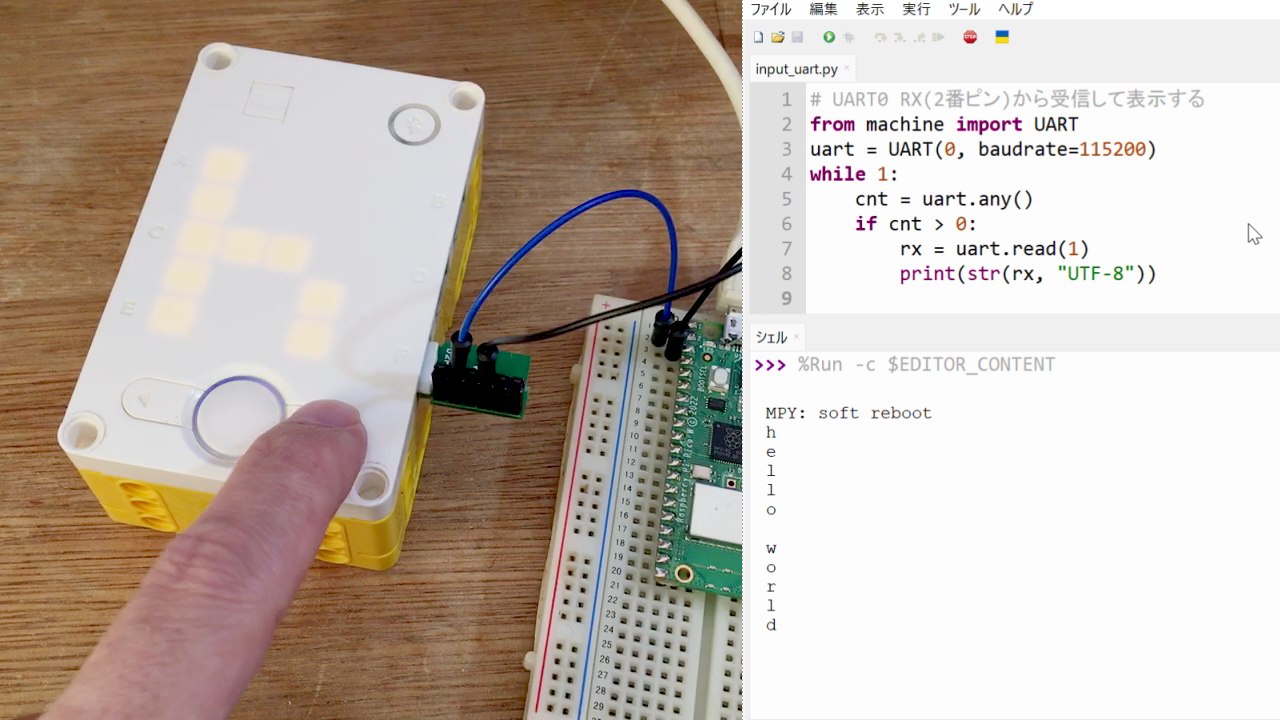
プログラムを実行すると、2秒間隔でライトマトリクスにループ回数を表示します。ループ回数は文字列化してから表示しています。表示している文字はUSBポートに送信します。ターミナルソフトの「Tera Term」で文字列を受信することができます。
time.hはダメでしたが、いくつかの標準ライブラリを使うことができました。まだ未確認のライブラリがたくさんあります。これらをうまくロボット作りに活用してみましょう。
プログラムを実行中の様子
当ブログの内容は、弊社製品の活用に関する参考情報として提供しております。
記載されている情報は、正確性や動作を保証するものではありません。皆さまの創意工夫やアイデアの一助となれば幸いです。