2021年4月5日
SPIKEプライムラージハブ内蔵ジャイロセンサーの使用例
■ジャイロセンサーを使用した例
- 例として「プログラム実行時に設定したヨー角に向きを合わせるプログラム」を製作します。
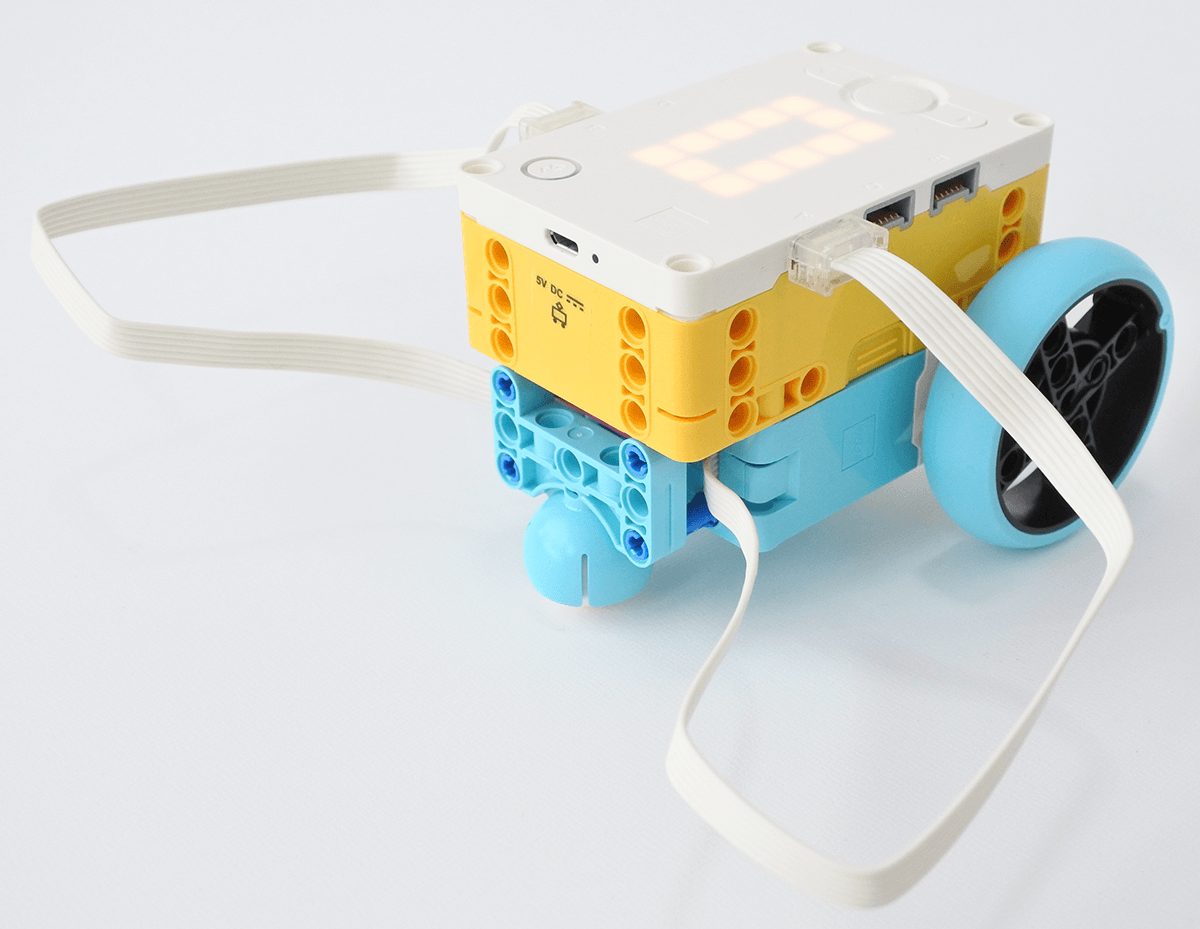
- 初めに簡易的な車体を用意します。 (ここではSPIKEプライム ラージハブを地面と水平になるように組み立ててください)
- SPIKEアプリでプログラミングします。
- 時計回りでヨー角がプラス、反時計回りでヨー角がマイナスになります。 (モーターのポート等はお使いのハードに合わせて変更してください)
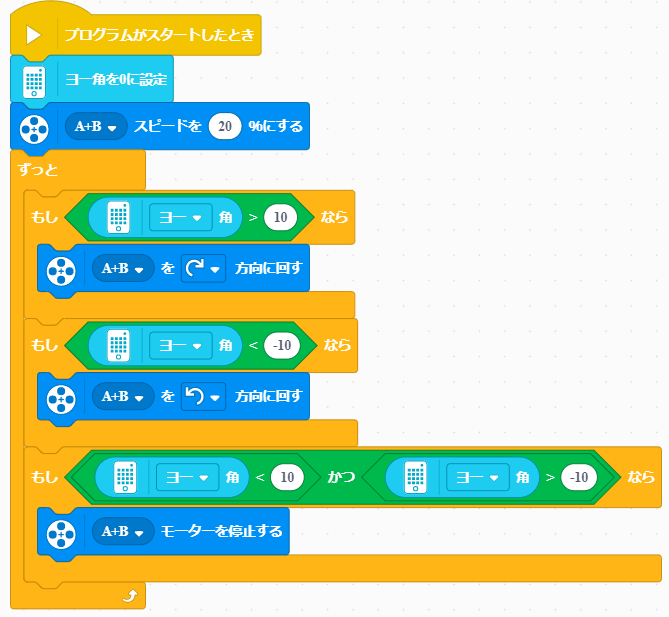
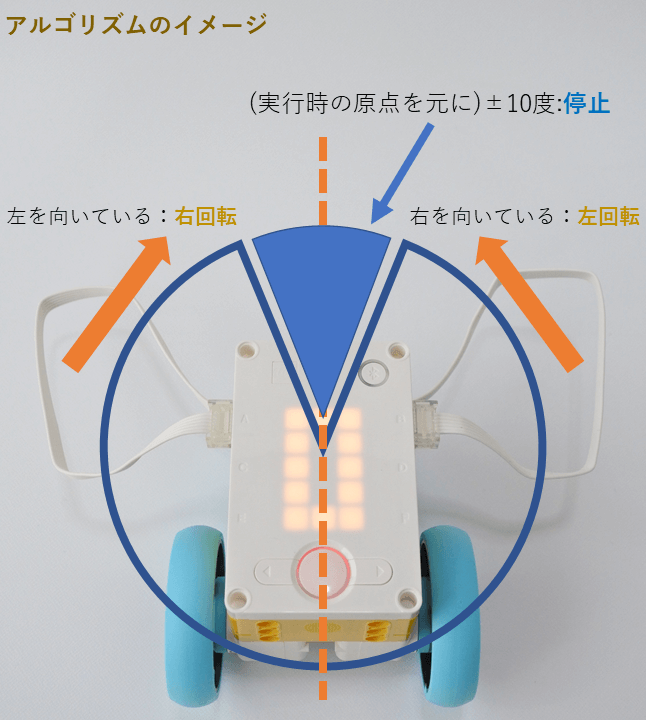
- 実行した直後に設定される原点の±10度の範囲であればモーターは停止します。
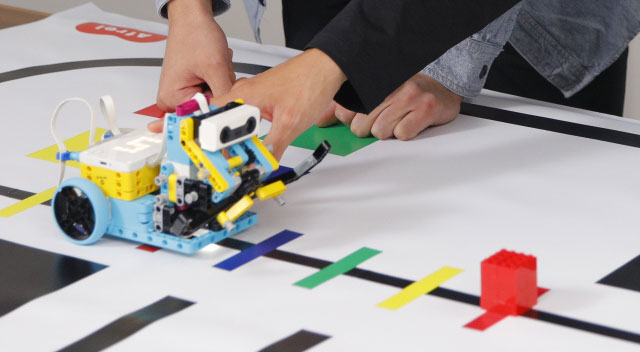
- ロボットの動きは、
この動画を参照してください。
(2021/03/16現在)