2022年6月6日
ホームポジションを設定する方法(DobotLab場合)
DOBOTには、任意に設定できるホームポジションと呼ばれる座標があります。ホームコマンド(ホームポジションへ移動する動作)を実行した際に基準とする座標であり、座標のズレをある程度リセットすることができます。
設定方法は、「Teaching & Playback Lab」で行います。
※「DobotBlock Lab」「Python Lab」ではホームポジションの設定ができません。
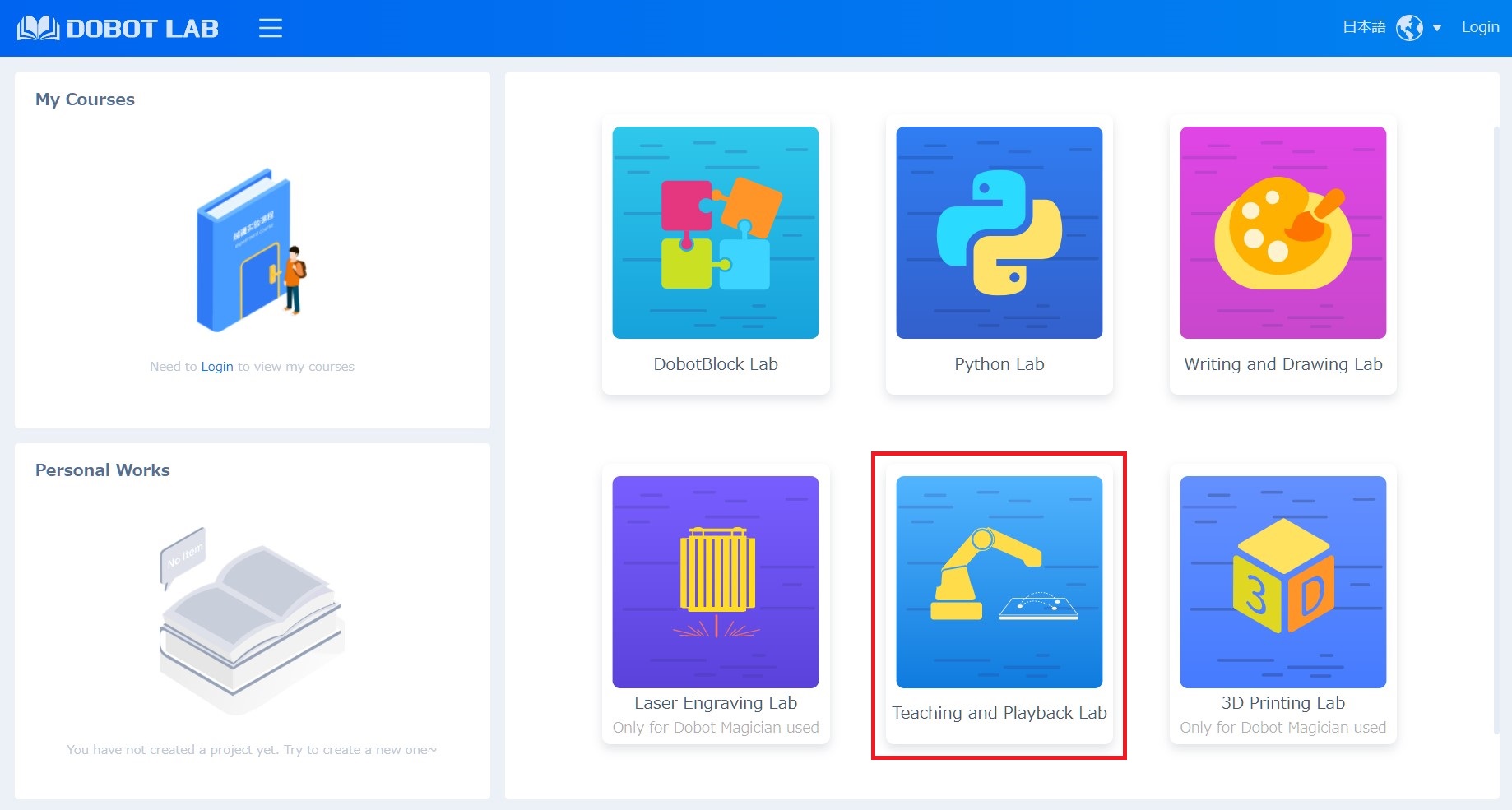
DobotLabを起動してください。
「Teaching & Playback Lab」を選択します。
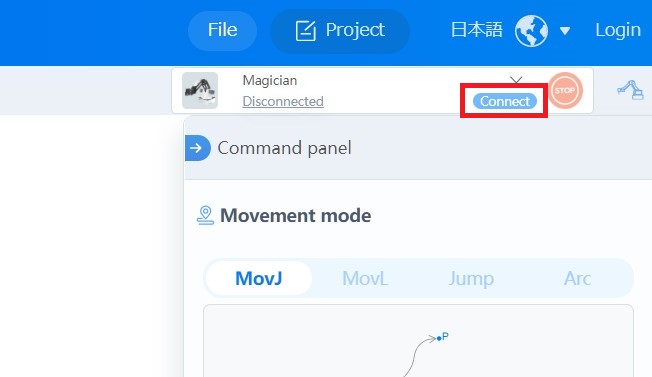
接続するDOBOTを指定後、「Connect」から接続してください。
ホームポジションに設定したい座標を用意します。
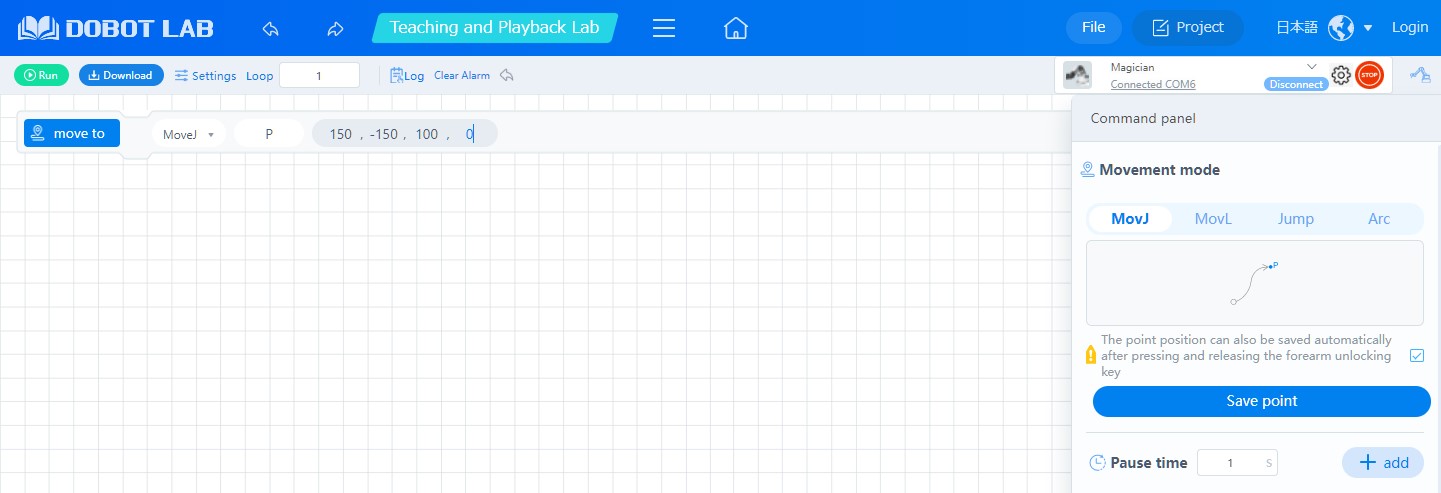
画面上にある「Save point」ボタンを押して、表示された各座標の数値をダブルクリックして任意の座標を指定します。 または、フォアアームにあるボタンを押しながら設定したい座標に移動してボタンを離して座標を指定してください。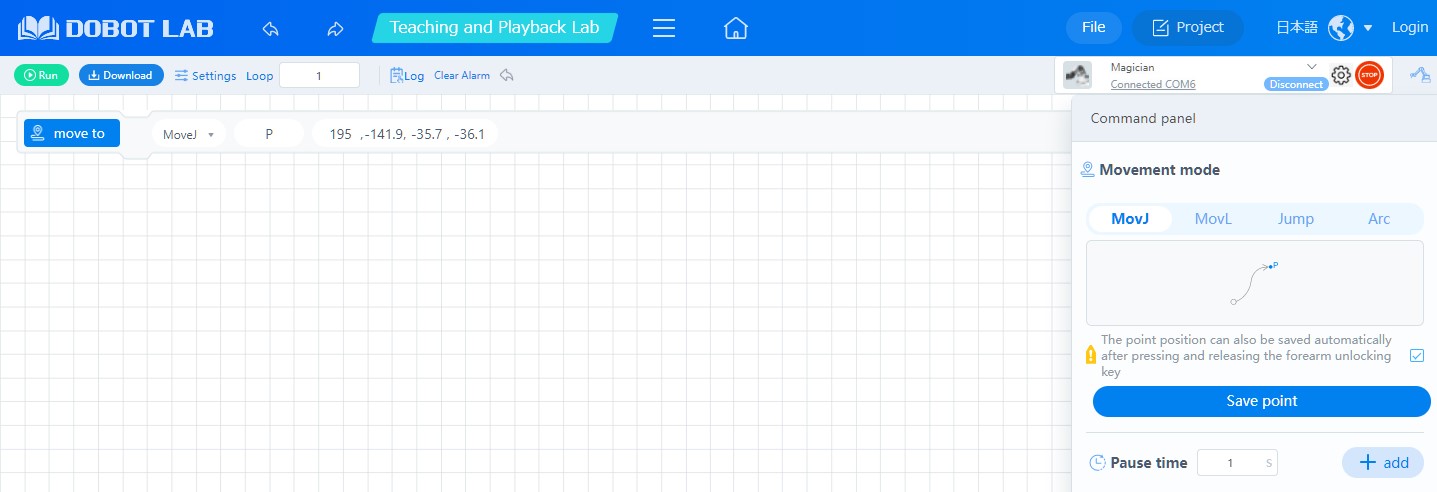
ホームポジションに設定したい座標を右クリックして、「Set Home」を選択します。
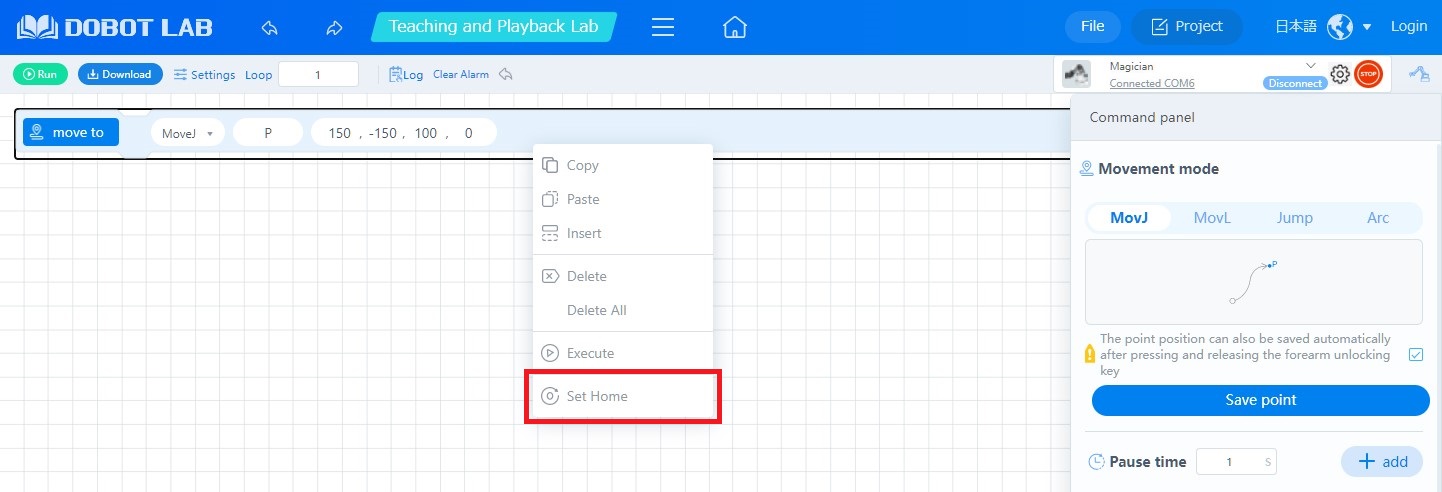
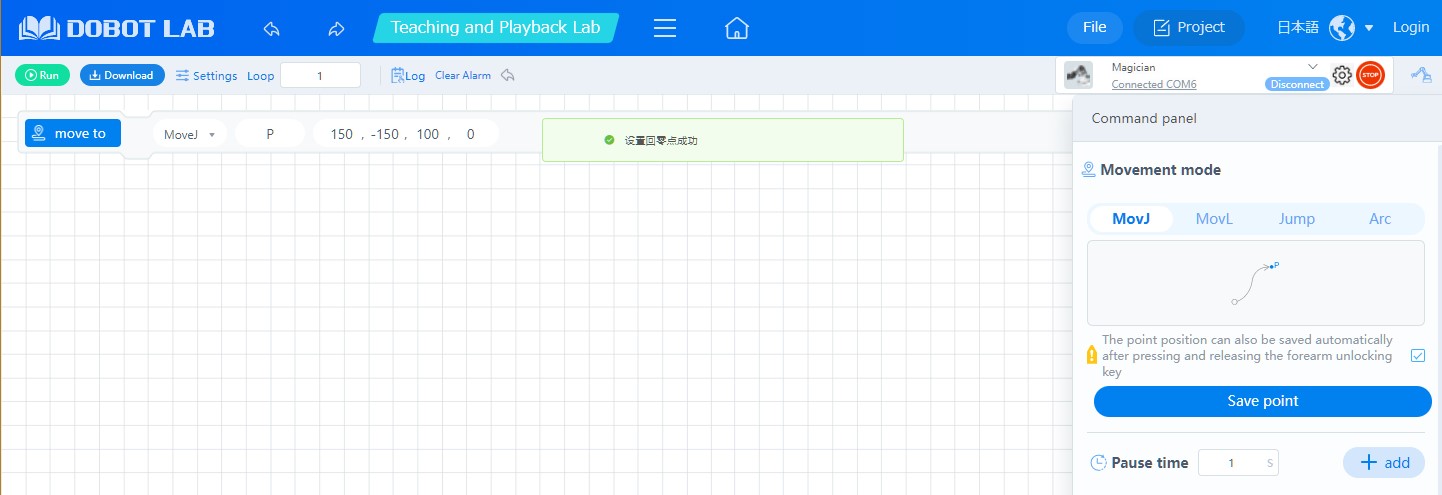
ポップアップが表示されれば設定は完了です。
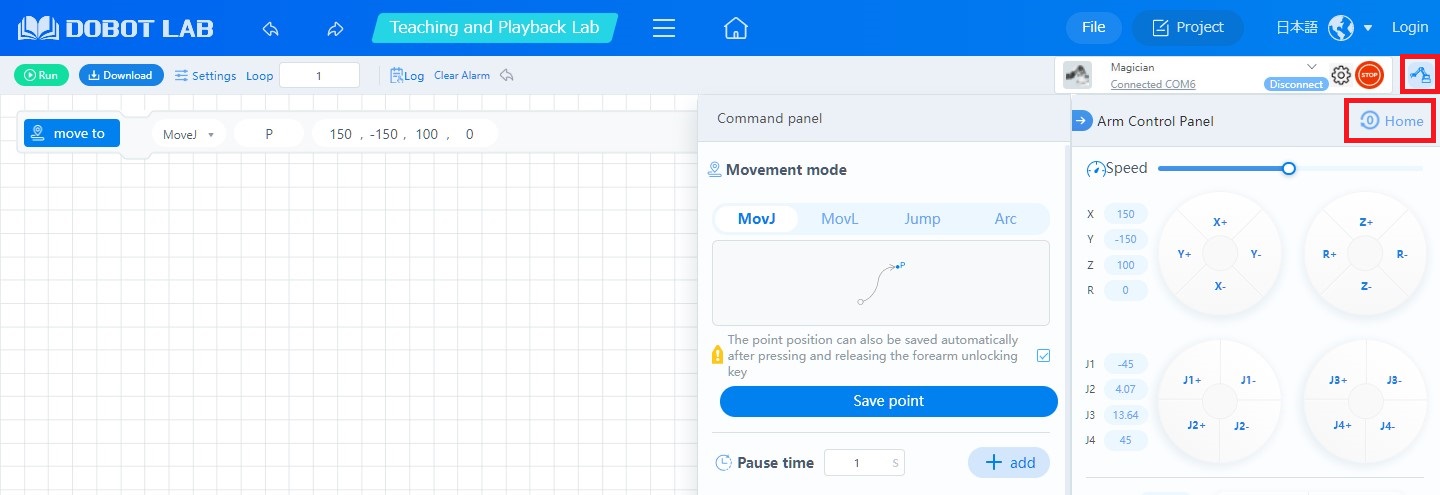
画面右上の「Arm Control」を押してArm Control Panelを開き、「Home」をクリックし、指定した座標に移動するか確認してください。
現在最新バージョンのDobotLab(V2.1.0)に基づく情報です。
(2022/06/03 現在)