2018年4月25日
- EV3ソフトウェア
- EV3技術情報
- TETRIX技術情報
- ソフトウェア
- ソフトウェア
(新)TETRIXをEV3ソフトウェアで動かすには-180度サーボモーターを動かす(2018/1~)
EV3ソフトウェアでTETRIXの180度サーボモーター(HS-485HB)を動かす方法を紹介します。
ここで紹介する内容は、仕様変更後のTETRIX MAX Servo Motor Expansion Controller(商品型番:PI-W44355)を使用したものです。
仕様変更前のサーボモーターコントローラー(商品型番:PI-W34302)を使用する場合はこちらをご覧ください。
仕様変更前後の製品についてはこちらをご覧ください。
なお、EV3ソフトウェアにTETRIX用のプログラミングブロックを追加していない場合は、こちらから追加してください。

EV3ソフトウェアでTETRIXの180度サーボモーターを動かすには、「TETRIX MAX Servo Motor」ブロックを使用します。

180度サーボモーターを回転させるには、「Move」モードを選択します。
回転時のスピードを設定するには、「Set Servo Speed」モードを選択します。
180度サーボモーターの位置を読みとるには、「Read Servo Position」モードを選択します。
Moveモードの各パラメータは以下のとおりです。
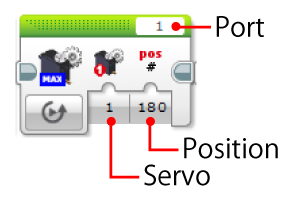
| Port | TETRIXのモーターコントローラーが接続されているEV3のセンサーポートの番号を選択します。 |
| Servo | サーボモーターコントローラーの、どのチャンネルに接続されているサーボモーターを制御するかを選択します。 |
| Position | サーボモーターをどの位置まで回転させるかを指定します。 Positionは0~180(単位:度)の範囲で指定します。 |
Set Servo Speedモードの各パラメータは以下のとおりです。(Moveモードと共通のパラメータは省略します。)
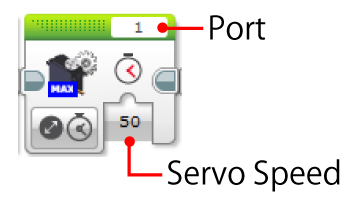
| Servo Speed | サーボモーターの回転スピードを、0~100の範囲で指定します。 設定したスピードは、サーボモーターコントローラーの電源を切るまで有効です。 |
Read Servo PositionモードのパラメータはMoveモードと同じです。
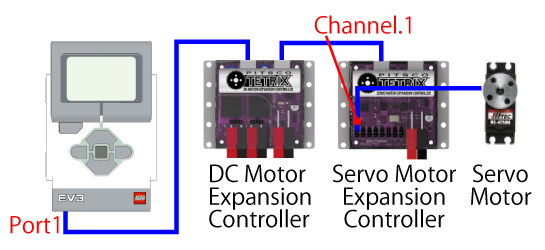
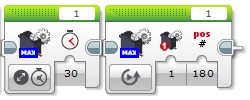
例えば上図のように接続された180度サーボモーターを、スピード30で、180度の位置まで回転させる場合は、
次のようにパラメータを設定します。
下図のプログラムは、180度サーボモーターを、スピード30で180度の位置まで回転させ、EV3のLモーターを1秒間回転させます。
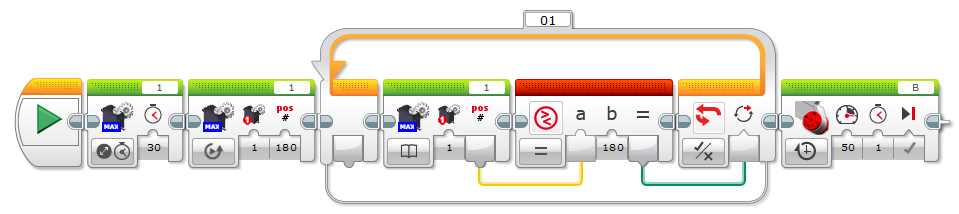
「TETRIX MAX Servo Motor」ブロックは、180度サーボモーターが指定した位置まで回転しおわるのを待たずに、次のブロックの処理へ移ります。
そのため、180度サーボモーターの回転完了を待って次の処理をしたい場合は、「TETRIX MAX Servo Motor」ブロックのうしろに、回転が完了するまで待機する処理を追加する必要があります。
(2018/04/05現在)