2018年4月25日
- EV3ソフトウェア
- EV3技術情報
- TETRIX技術情報
- ソフトウェア
- ソフトウェア
(新)TETRIXをEV3ソフトウェアで動かすには-DCモーターを動かす(2018/1~)
EV3ソフトウェアでTETRIXのDCモーターを動かす方法を紹介します。
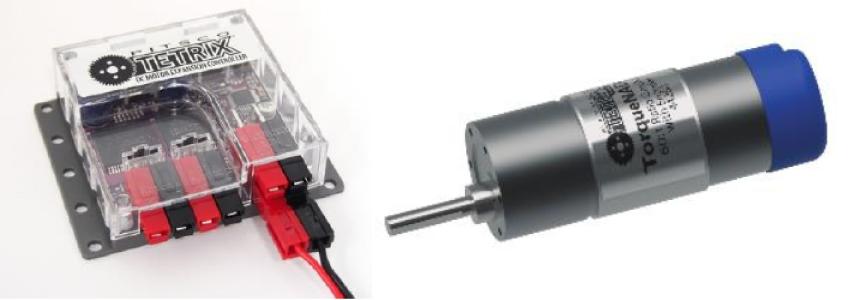
ここで紹介する内容は、左図の仕様変更後のTETRIX MAX DC Motor Expansion Controller(商品型番:PI-W44354)とTETRIX TorqueNADOモーター(商品型番:PI-W44260)を使用したものです。
仕様変更前のDCモーターコントローラー(商品型番:PI-W34303)とDCギアモーター(商品型番:PI-W39530)を使用する場合はこちらをご覧ください。
仕様変更前後の製品についてはこちらをご覧ください。
なお、EV3ソフトウェアにTETRIX用のプログラミングブロックを追加していない場合は、こちらから追加してください。

EV3ソフトウェアでTETRIXのDCモーターを動かすには、「TETRIX MAX DC Motor」ブロックを使用します。
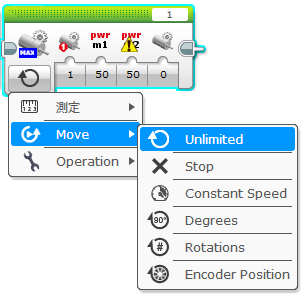
DCモーターを回転させるには「Move→Unlimited」モードを、停止させるには「Move→Stop」モードを、選択します。
Move→Unlimitedモードの各パラメータは以下のとおりです。
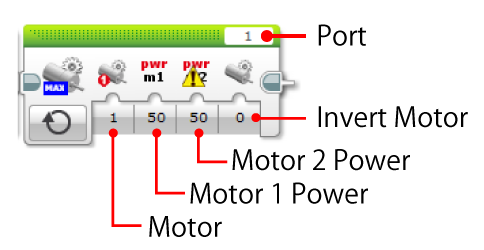
| Port | TETRIXのモーターコントローラーが接続されているEV3のセンサーポートの番号を選択します。 |
| Motor | モーターコントローラーに接続されているDCモーターのうち、どれを回転させるかを選択します。 Motor 1:Motor 1に接続されているモーター Motor 2:Motor 2に接続されているモーター Both Motors:両方のモーター |
| Motor 1 Power | パラメータ「Motor」で、「Motor 1」または「Both Motors」を選択したとき、モーターコントローラーのMotor 1に接続されているDCモーターの回転パワー(スピード)を入力します。 -100~100の範囲で指定します。 |
| Motor 2 Power | パラメータ「Motor」で、「Motor 2」または「Both Motors」を選択したとき、モーターコントローラーのMotor 2に接続されているDCモーターの回転パワー(スピード)を入力します。 -100~100の範囲で指定します。 |
| Invert Motor | 回転方向を反転させるDCモーターを指定します。 None:どちらのモーターも反転させない Motor 1:Motor 1に接続されているモーターを反転 Motor 2:Motor 2に接続されているモーターを反転 Both Motors:両方のモーターを反転 |
Move→Stopモードの各パラメータは以下のとおりです。
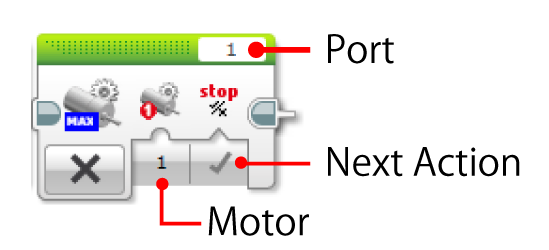
| Port | TETRIXのモーターコントローラーが接続されているEV3のセンサーポートの番号を選択します。 |
| Motor | モーターコントローラーに接続されているDCモーターのうち、どれを停止させるかを選択します。 Motor 1:Motor 1に接続されているモーター Motor 2:Motor 2に接続されているモーター Both Motors:両方のモーター |
| Next Action | DCモーターのブレーキ方法を選択します。 True(Brake):モーターをすぐに停止 False(Float):モーターパワーが0になり、惰性で回転後停止 |
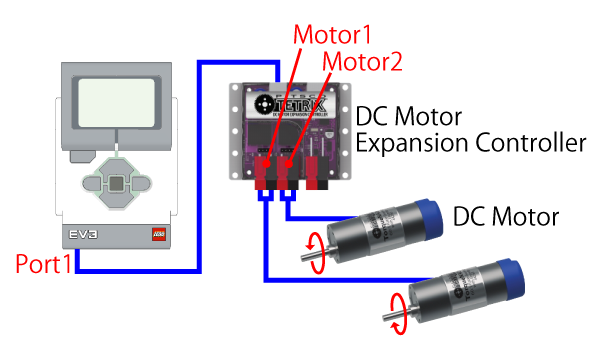
例えば上図のようにDCモーターが接続されているとき、Motor 1に接続されたDCモーターをパワー100で、Motor 2に接続されたDCモーターを反転させてパワー10で、2秒間回転させる場合は、次のようなプログラムになります。
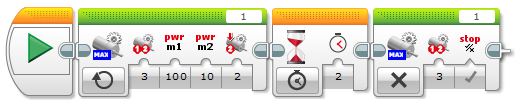
※ プログラムでDCモーターの回転を停止させないと、プログラムが終了してもDCモーターは回転し続けてしまう点に注意しましょう。
※ プログラムを実行してもDCモーターが動かない場合、DCモーターコントローラーがEV3に認識されていない可能性があります。DCモーターコントローラーとEV3を接続しているケーブルを挿しなおしてみましょう。
(2018/03/27 現在)