2026年2月19日
- コンピュータサイエンス&AI
- ソフトウェア
ソフトウェア比較
コンピュータサイエンス&AI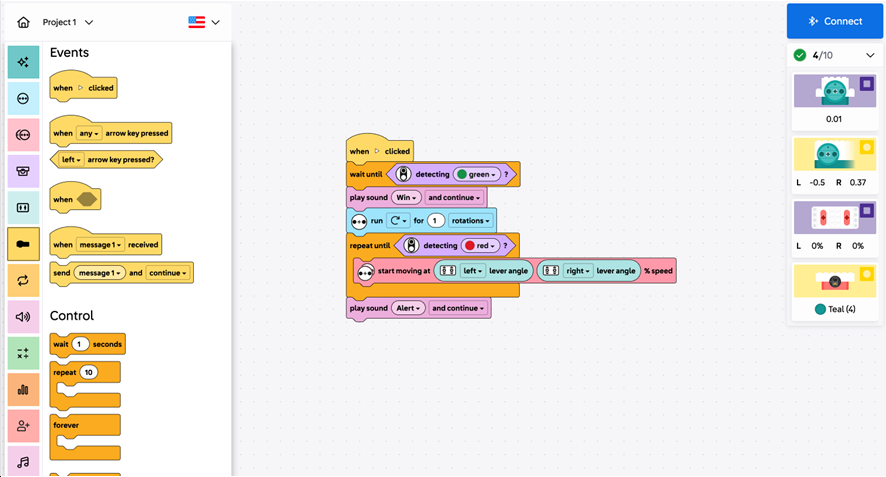 |
SPIKEプライム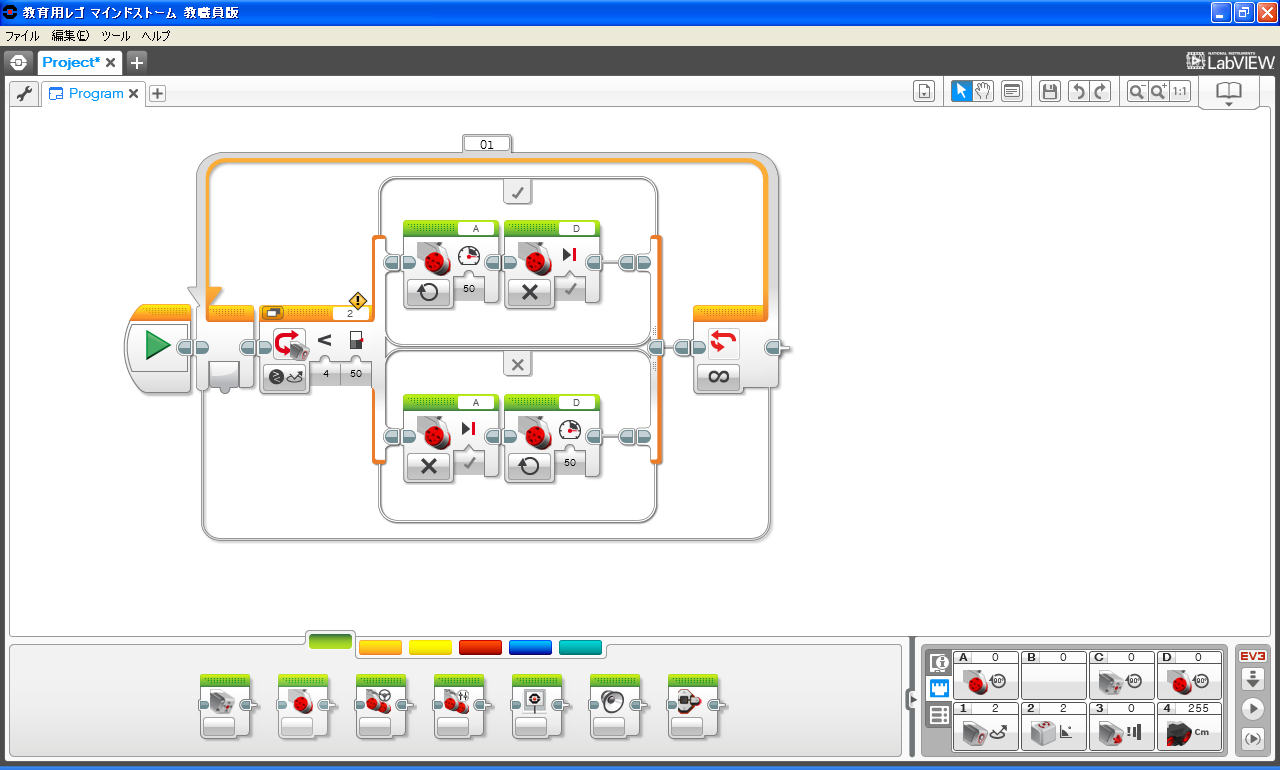 |
教育版 EV3 |
WeDo 2.0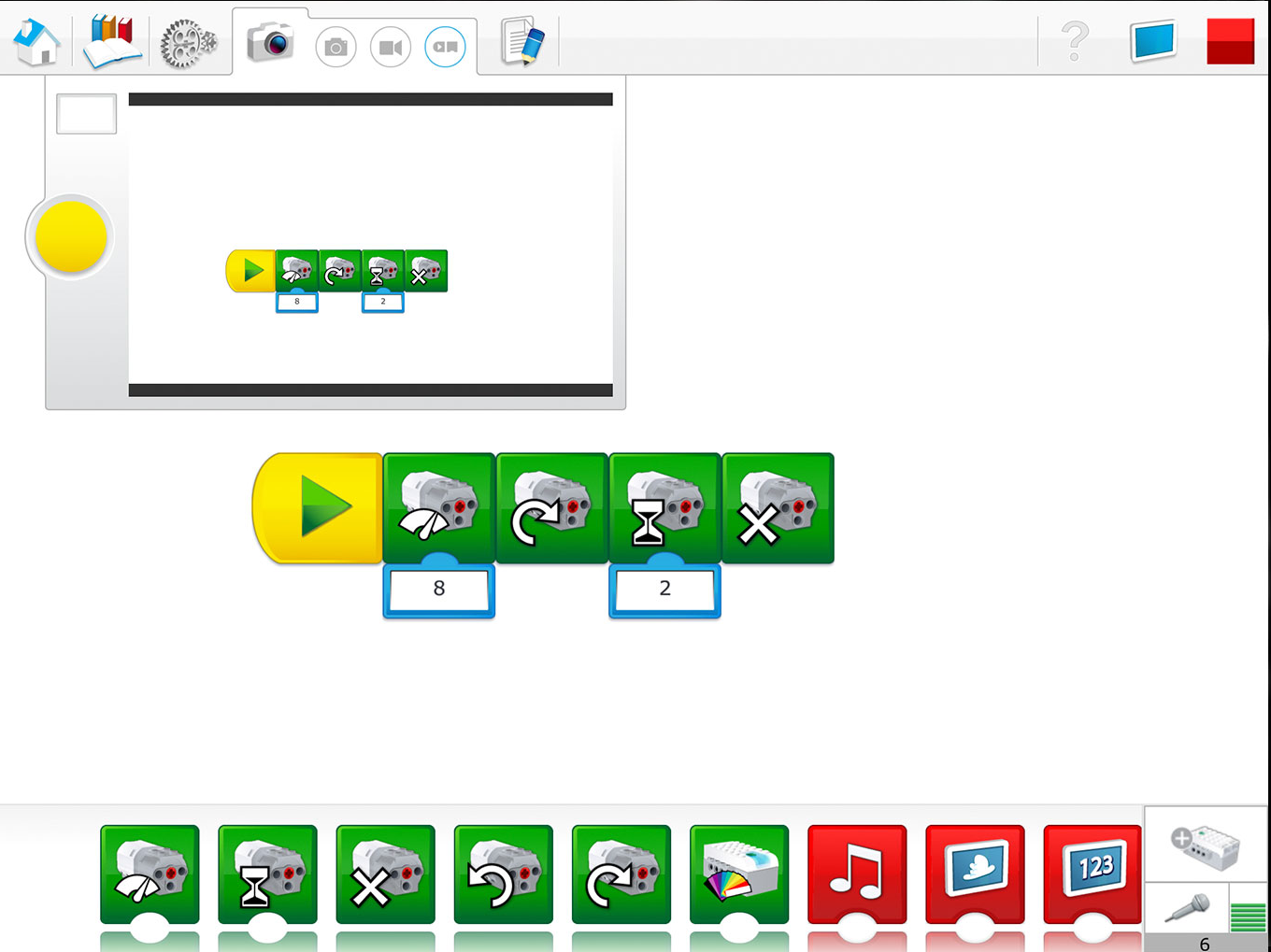 |
|||
| 要件等 | 提供方法 | Webアプリ または App Store(iPadのみ) | インストーラー ダウンロード または ストア | インストーラー ダウンロード | ストア (一部OSへインストーラー提供あり) |
|
| 対応OS | 確認中 | ・Windows10 ・Mac OS10.14~ ・iOS 8.1~(iPad) ・Android 7.0~(タブレット) ・Chromebook |
・Windows7/8.1/10 ・Mac OS10.6~10.14 |
・Windows7/10 ・Mac OS ・iOS8.1~(iPad) ・Android 4.0~(タブレット) |
||
| その他の要件 |
・Web BLE対応ブラウザ ・Bluetooth Low Energy ・カメラ(AI機能で使用) |
Bluetooth 4.0以降(タブレットの場合) | Bluetooth LE | |||
| 利用時の インターネット接続 |
必要 | 一部要(拡張ブロック・コンテンツのダウンロード) | 一部要(ヘルプ) | 一部要(教師用ガイド) | ||
| プログラミング | プログラミング方法 | ワードブロック(Scratchベース)/アイコンブロック(※3) | ワードブロック(Scratchベース)/アイコンブロック/Python | Scratchベース/ブロックプログラミング | ブロックプログラミング | |
| プログラミングブロック | 外部開発環境 | Python(※3) | C/C++ | C/C++、Java、mRuby、Python | ||
| モーター (モーター単体の制御) |
○ (角度、回転数、ONでの制御が可能。) |
○ (角度、回転数、時間、ONでの制御が可能。) |
○ (角度、回転数、時間、ONでの制御が可能。) |
○ (時間、ONでの制御が可能。) |
||
| ステアリング (2つのモーターまたはダブルモーターを車のように制御) | ○ (角度、Steps、ONでの制御が可能。) |
○ (角度、回転数、時間、ON、距離での制御が可能。) |
○ (角度、回転数、時間、ONでの制御が可能。) |
× | ||
| タンク (2つのモーターをタンク(戦車)のように制御) | ○ (ONでの制御が可能。) |
○ (角度、回転数、時間、ON、距離での制御が可能。) |
○ (角度、回転数、時間、ONでの制御が可能。) |
× | ||
| Motors (ダブルモーターを同時に制御) | ○ (角度、回転数、ONでの制御が可能。) |
|||||
| LED | なし | ○ (ラージハブのLED(5×5マスおよびボタン)、距離センサーのLEDの制御が可能。) |
○ (インテリジェントブロックのボタンのLEDが制御可能。) |
○ (スマートハブのボタンの LEDが制御可能。) |
||
| 画面表示 | なし | △ (ラージハブの5×5マスのLEDで、文字列や絵柄の表示が可能。) |
○ (インテリジェントブロックの 液晶画面に文字列や画像を表示可能。) |
× | ||
| 音 | ○ ・登録されたサウンド |
○ ・登録されたサウンド ・録音したサウンド ・ビープ音 ・楽器の音 (ビープ音はラージハブのスピーカーから、 それ以外はPCまたはタブレットのスピーカーから鳴る。) |
○ ・登録されたサウンド ・録音したサウンド ・ビープ音 |
○ ・登録されたサウンド ・録音したサウンド (音はPCまたはタブレットの スピーカーから鳴る。) |
||
| ボタン | なし | ○ (ラージハブのボタンによる制御が可能。) |
○ (インテリジェントブロックの ボタンによる制御が可能。) |
× | ||
| 待機 | ○ | ○ | ○ | ○ | ||
| くり返し | ○ | ○ | ○ | ○ | ||
| 分岐 | ○ | ○ | ○ | △ (メッセージ送受信の ブロックを使って実現 できる場合がある。) |
||
| コントローラー | 〇 (Up/Release/Downおよび ポジションレベルを取得可能。) |
なし | なし | なし | ||
| センサー | ○ (各種センサーによる、待機、くり返し、分岐などが可能。) |
○ (各種センサーによる、待機、くり返し、分岐などが可能。) |
○ (各種センサーによる、待機、くり返し、分岐などが可能。) |
○ (各種センサーによる、 待機が可能。くり返しや 分岐は条件次第で可能。) |
||
| 演算 | ○ ・四則演算 ・論理演算 ・比較 ・関数計算 ・ランダム など |
○ ・四則演算 ・論理演算 ・比較 ・文字列操作 ・関数計算 ・ランダム など |
○ ・四則演算 ・論理演算 ・比較 ・文字列操作 ・関数計算 ・ランダム など |
○ (四則演算のみ) |
||
| 変数・配列 | ○ | ○ | ○ | × | ||
| Bluetooth通信 | × | × | ○ (EV3間でのBluetooth通信によるメッセージ送受信が可能。) |
× | ||
| ファイル出力 | × | × | ○ | × | ||
| データロギング | × | × | ○ | × | ||
| マイブロック | ○ | ○ | ○ | × | ||
| コメント | ○ | ○ | ○ | ○ | ||
| 実行方法 | ・リモート制御 (プログラムの実行時は、PCまたはタブレットと、センサーやモーターが接続されている必要がある。) |
・ダウンロードモード (プログラムはSPIKEプライム(ロボット)にダウンロードされ、SPIKEプライムで実行される。) ・ストリーミングモード |
・ダウンロードして実行 (プログラムはEV3(ロボット)にダウンロードされ、EV3で実行される。) |
・リモート制御 (プログラムの実行時は、 PCまたはタブレットと、 WeDo2.0が接続されている 必要がある。) |
||
| 接続方法 | Bluetooth Low Energy(BLE) | WindowsおよびMac OS:USB/Bluetooth iPadおよびAndroidタブレット:Bluetooth |
USB/Bluetooth/Wi-fi (Wi-fiは別途特定のドングルが必要。) |
Bluetooth | ||
| その他 | ファームウェア更新 | あり(Bluetooth) | 要(USB/Bluetooth ※2) | 要(USB) | なし | |
| コンテンツ | チュートリアル | ティーチャーポータルに掲載(スタートガイド) | ○ | ○ | ○ | |
| レッスンプラン | ティーチャーポータルに掲載(学年カテゴリごとに各30レッスン) | 26 | × | 32(チュートリアル含む) | ||
| 組み立てモデル数 | ティーチャーポータルと同様 | 28 | 11 | 41 | ||
| ヘルプ | ○ | ○ | ○(インターネット接続が必要) | ○ | ||
| プログラムの保存 (PC側) |
任意の場所に保存 (Webアプリの場合) |
自動保存 (ファイルコピーまたはアプリの共有機能を使って、他のPCやタブレットにプログラムを共有することができる。) |
任意の場所に保存 (ファイルコピーによって他のPCへプログラムの共有ができる。) | 自動保存 (Windows10のみ、 プログラムを他のPCへ 共有する機能がある。) |
||
| プログラムの保存 (Robot側) |
- | 可能(20個まで) | 可能(保存数はプログラムのサイズによる) | 不可 | ||
| 接続数 (PC:Robot) |
1:8 | 1:1 | 1:1 | 1:3(Windows7以外) | ||
| 拡張性 | × | 3rd Partyセンサーへの対応は未定。 | Hitechnic社製センサー NXTセンサー TETRIX など |
× | ||
※動作要件について詳しくは、各ソフトウェアの動作要件のご案内をご確認ください。
※2…初回のファームウェア更新にはUSB接続(Windows/Mac)が必要です。
※3…順次提供予定
(2026/02/16現在)