2022年7月21日
SPIKE Lモーターを使ったアーム制御
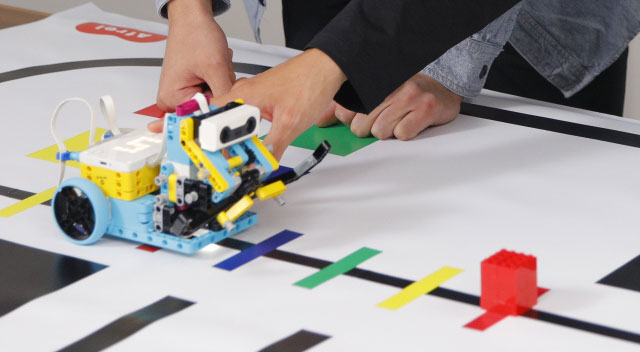
ロボコンの競技ではロボットに様々なオブジェクトを運ばせなければならない場面が多くあります。
その場合、モーターを利用してアームを駆動して運ぶ方法がよく採用されます。アームを使ってオブジェクトを持ち上げたり、ひっぱったり、挟んで抱え込んだり、引っ掛けたりとアームによってアプローチは様々です。
今回は単純なアームとして、モーターの回転に合わせて回し引っ掛けるアームを考えていきます。
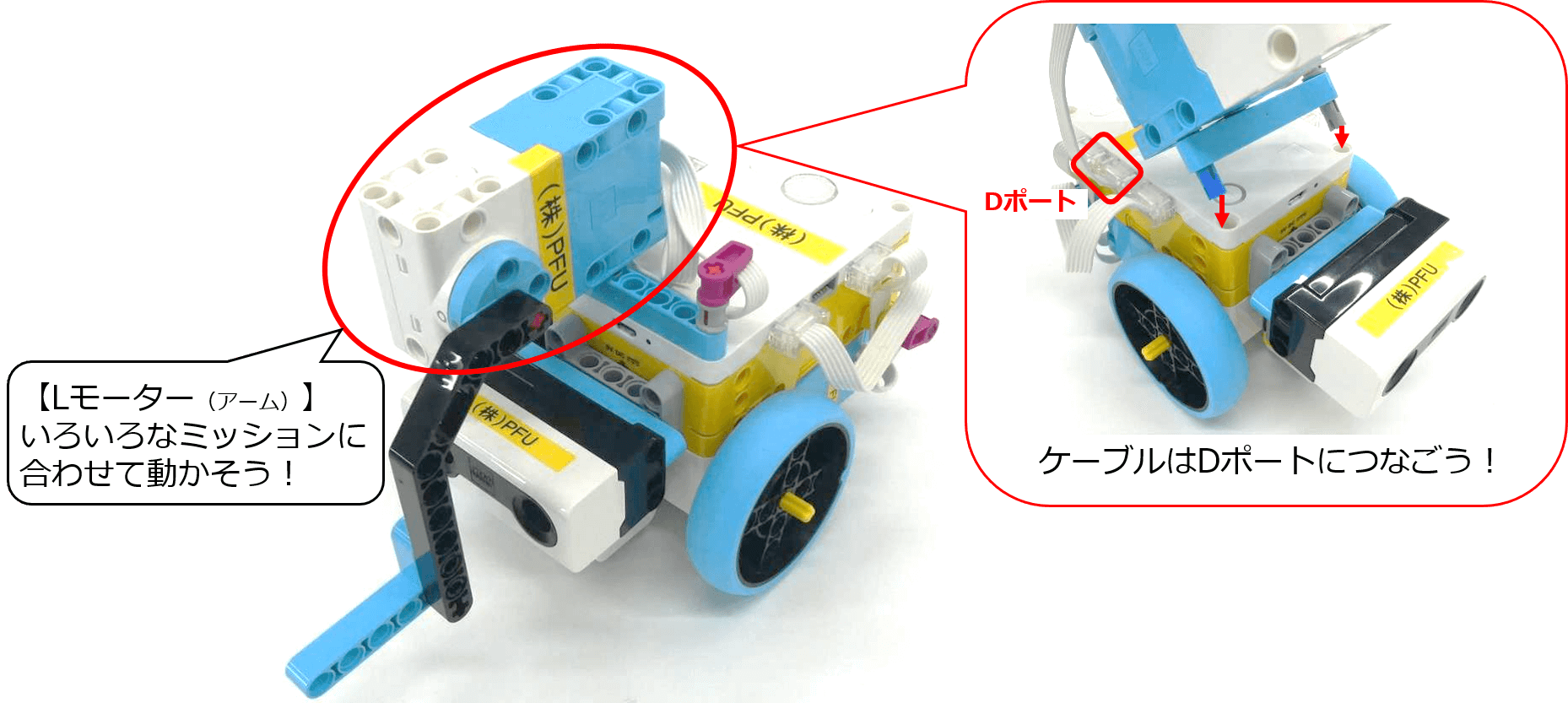
はじめに簡易的な車体を用意します。(ここではSPIKEプライム ラージハブを地面と水平になるように組み立ててください。)
車体に使用しているハードウェア
- SPIKEプライム ラージハブ
- Mモーター×2(E、Fポート)
- Lモーター(Dポート)
◆Lモーターを使ってみましょう。
ラージハブをPCとUSB接続、もしくはBluetooth接続するとSPIKEアプリ上でLモーターの角度の値を確認することができます。
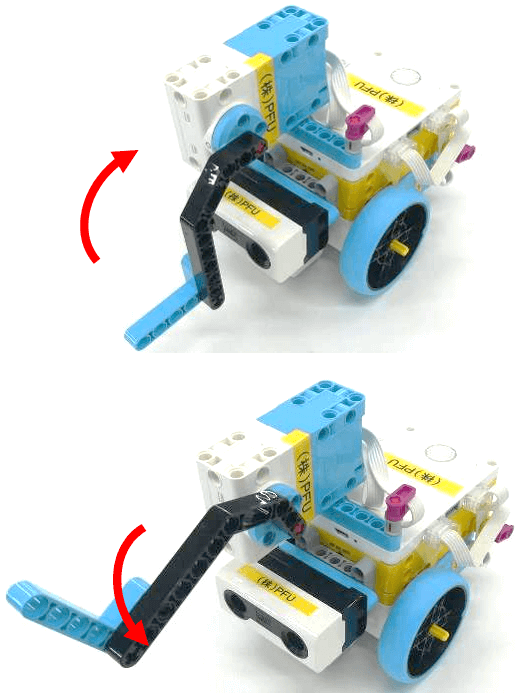
アームを下げた時のLモーターの角度と、アームを上げた時のLモーターの角度を確認してみましょう。
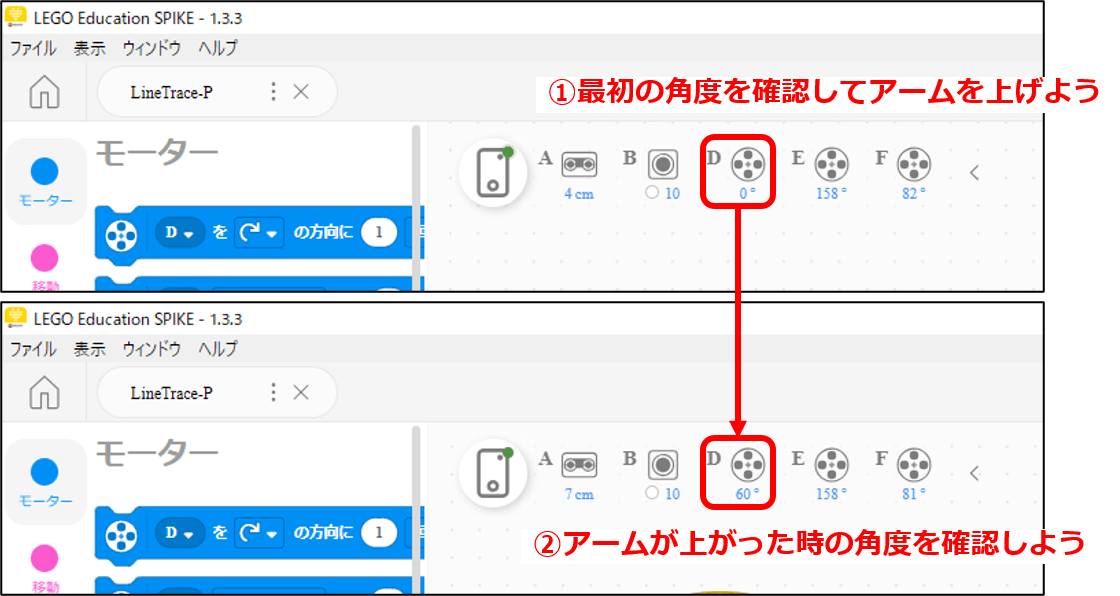
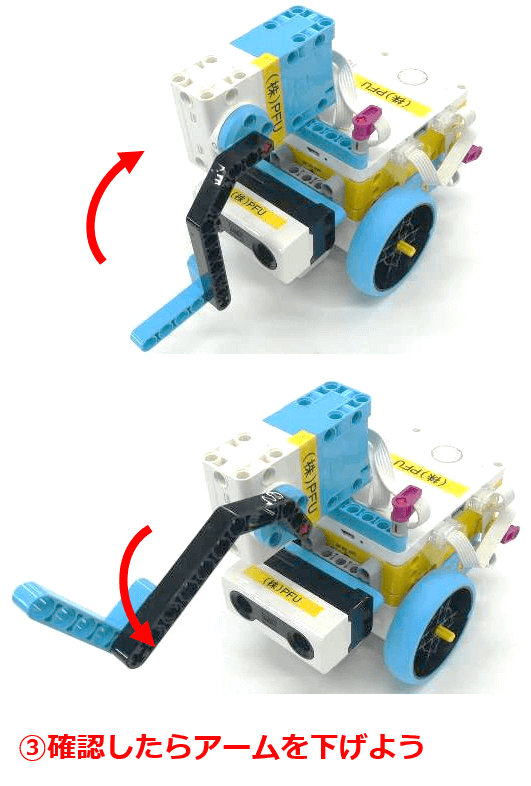
※持ち上げたり、引っ掛けたりするオブジェクトに合わせて、アームの上げる/下げる位置を考えて角度を確認しましょう。
◆SPIKEアプリでプログラミングします。
◆プログラムについて
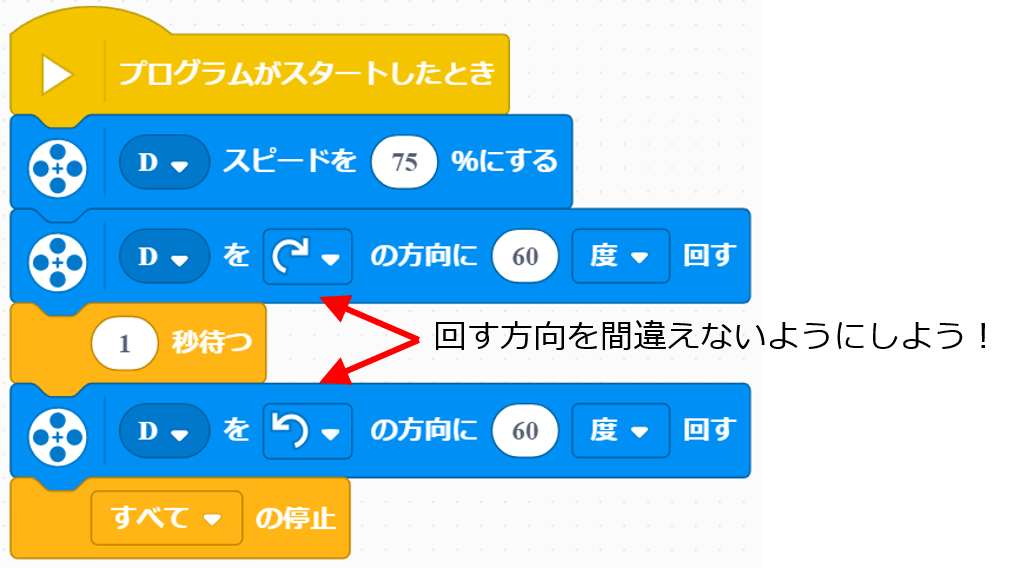
アームを上げて、1秒後に下ろすシンプルなプログラムです。 単一モーターを制御するブロックで、Dポートに接続されているLモーターを動作させています。 図にも記載があるように、モーターの回転方向の指定に注意してプログラムを作成しましょう。
今回はシンプルなアームを動かすプログラムでしたが、この動きをセンサーでオブジェクトを発見した時や、指定の場所まで走行した後に行わせる必要があることを覚えておきましょう。
以下でもSPIKEプライムを使ったロボコン競技に役立つ技術情報を公開しています。ぜひチェックしてみてください。
ロボジョイURL:http://www.robojoy-club.com/challenge.php

協力:株式会社PFU
※2022/6/9現在 最新バージョン(2.0.6)のSPIKEアプリに基づく情報です。
※これらの仕様はアプリのアップデートによって変更される場合があります。
(2022/6/9 現在)