2016年5月30日
- EV3ソフトウェア
- EV3技術情報
- ソフトウェア
ジャイロボーイが動かない(倒立しない)原因
ジャイロボーイは、教育版EV3ソフトウェアに含まれる、二輪倒立ロボットモデルです。

ジャイロボーイを組み立てて、サンプルプログラムを実行しても、ジャイロボーイが動き出さない場合、以下の2点をご確認ください。
○1:接続ポートの確認
ジャイロボーイの組み立ては、とても複雑です。センサーやモーターが正しいポートに接続されているか、確認してください。
ジャイロボーイの各センサー・モーターの接続ポートは以下のとおりです。
Lモーター(右足)… PortA
Lモーター(左足)… PortD
Mモーター … PortC
カラーセンサー … Port1
ジャイロセンサー … Port2
タッチセンサー … Port3
超音波センサー … Port4
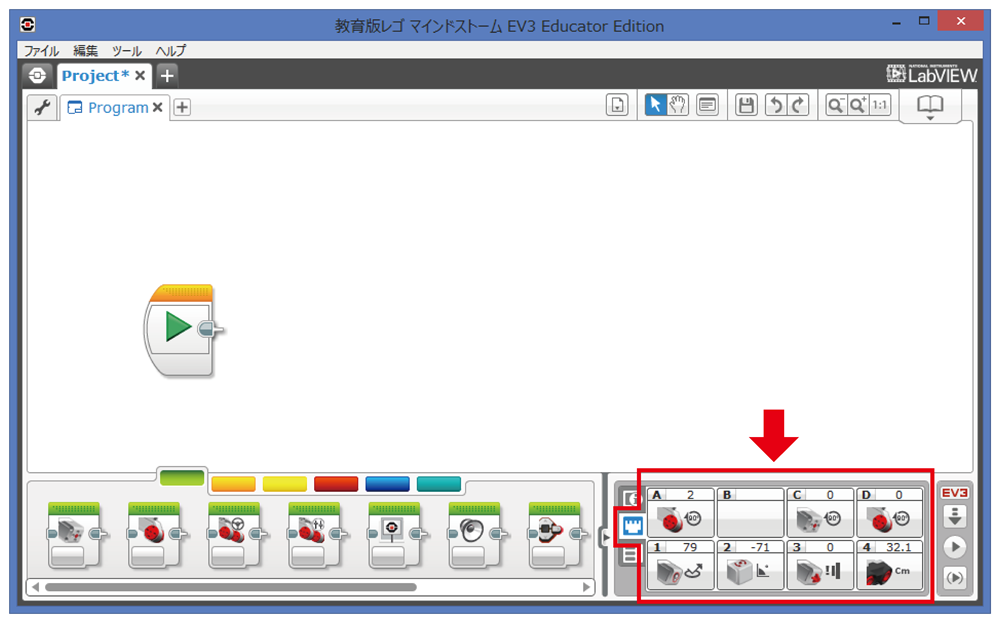
なお、接続されているポートは、PortViewで見ると簡単に確認することができます。(Lモーターの左右は、ケーブルをたどって確認してください。)
○2:ジャイロセンサー初期化の確認
ジャイロセンサーは、正しく初期化されていないと正しい値が読み取れません。ジャイロボーイは、ジャイロセンサーで読み取った値を使ってバランスをとるロボットのため、正しい値が読み取れないと、動き出すことができません。
「ジャイロセンサーを初期化する」を参照し、ジャイロセンサーを正しく初期化してから、サンプルプログラムを実行してみてください。
なお、ジャイロボーイのサンプルプログラムは、一緒に組み立てたイスにジャイロボーイを座らせた状態で実行してください。