2017年5月16日
- EV3ソフトウェア
- EV3技術情報
- TETRIX技術情報
- ソフトウェア
- ソフトウェア
TETRIXをEV3ソフトウェアで動かすには-エンコーダ付きDCモータを動かす

EV3ソフトウェアでTETRIXのエンコーダ付きDCモータを、角度や回転数を指定して制御する方法を紹介します。
ここで紹介する内容は、仕様変更前のDCモーターコントローラー(商品型番:PI-W34303)とDCギアモーター(商品型番:PI-W39530)を使用したものです。仕様変更後のTETRIX MAX DC Motor Expansion Controller(商品型番:PI-W44354)とTETRIX TorqueNADOモーター(商品型番:PI-W44260)を使用する場合はこちらをご覧ください。
仕様変更前後の製品についてはこちらをご覧ください。
なお、EV3ソフトウェアにTETRIX用のプログラミングブロックを追加していない場合は、こちらから追加してください。
また、DCモータの基本的な制御方法(エンコーダを使用しない)はこちらをご覧ください。
エンコーダの取り付け方法はこちらをご覧ください。
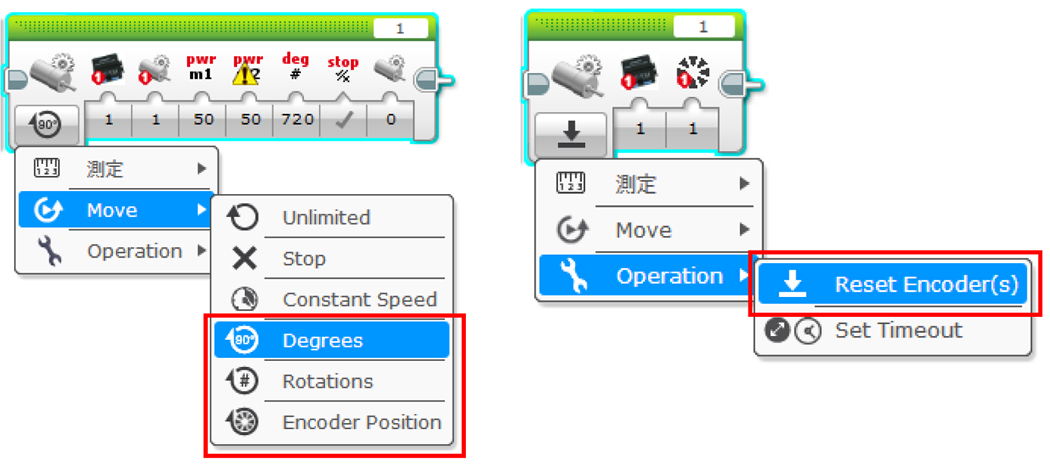
 EV3ソフトウェアでTETRIXのエンコーダ付きDCモータを動かすには、「HiTechnic Motor Controller for TETRIX」ブロックを使用します。
EV3ソフトウェアでTETRIXのエンコーダ付きDCモータを動かすには、「HiTechnic Motor Controller for TETRIX」ブロックを使用します。
エンコーダ付きDCモータを、角度や回転数を指定して制御するには、「Move→Degrees」モード、「Move→Rotations」モード、「Move→Encoder Position」モード、「Operation→Reset Encoder(s)」モードを使用します。
各モードのパラメータと使用例は以下のとおりです。
(DCモータの基本的な制御方法(こちら)と共通のパラメーターは説明を省略します。)
(エンコーダのコネクタケーブルはEnc.1ポートに接続されている事とします。)
◯Move→Degreesモード
角度を指定して回転させます。
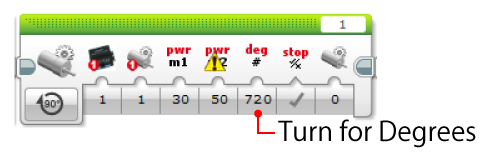
| Turn for Degrees | 回転角度を指定します。 |
下図のようなプログラムの場合、DCモータはプラス方向に720度回転後1秒待機し、マイナス方向に360度回転します。

◯Move→Rotations sモード
回転数を指定して回転させます。
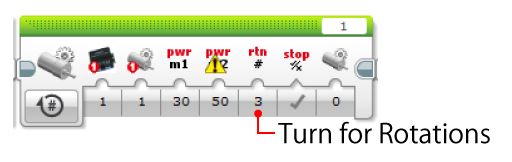
| Turn for Rotations | 回転数を指定します。 |
下図のようなプログラムの場合、DCモータはプラス方向に3回転後1秒待機し、マイナス方向に2回転します。

◯Move→Encoder Positionモード
指定したポジションまで回転させます。(サーボモータのように制御します。)
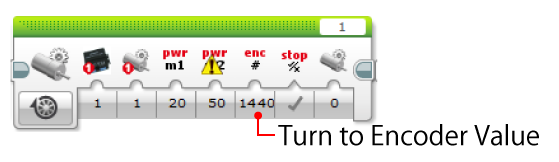
| Turn to Encoder Value | どの位置まで回転させるか指定します。 単位は1/4度です。(360度の位置=1440を指定) 例えば、現在地(エンコーダの値)が30のとき300を指定すると、プラス方向に270(67.5度)回転します。 |
◯Operation→Reset Encoder(s)モード
エンコーダの値をリセットします。
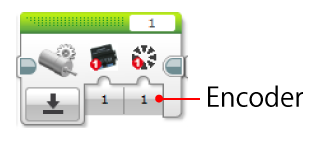
| Encoder | リセットするエンコーダが接続されているチャンネルを指定します。 |

(2018/03/27現在)