2022年8月4日
コンベヤーベルトを動かす (DOBOTStudioの場合)
DOBOTには、拡張機器(別売)としてコンベヤーベルトキットがあります。
可変速コンベヤーとして、DOBOT対象物の搬送機構を付加することができます。

接続方法について
本体の組立方法はキット付属のマニュアルを参照ください。

Stepper1ケーブル(モーター接続)をStepper1端子に接続します。
- コンベヤーベルトのバージョンを以下の手順で確認します。写真は色なしなのでV1.0です。
- 端子の色なし (Stepper1白):V1.0
- 端子の色付き (Stepper1黄):V2.0
動かし方 (初期設定とホームポジション自動復帰)
DOBOTと接続します。

動かし方 (Blocklyで制御)
下記3通りのサンプルプログラムをお試しください。いずれも同じ動作です。
サンプル1:速度制御
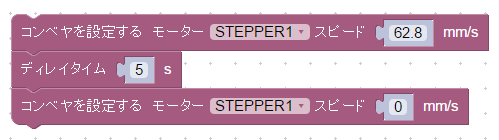
プログラム動作解説
- コンベヤの速度を62.8[mm/s]に設定し起動
(62.8[mm/s] ≒ 10000[pulse/s]) ※ 実際の速度との誤差はあります。 - 5秒待機
- コンベヤの速度を0[mm/s]に設定し停止
サンプル2:モーター速度パルス数制御
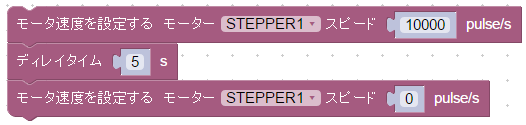
プログラム動作解説
- コンベヤーの速度パルス数を10000[pulse/s]に設定し起動
- 5秒待機
- コンベヤーの速度パルス数を0[pulse/s]に設定し停止
サンプル3:モーター速度パルス数 & 距離パルス数制御

プログラム動作解説
- コンベヤーの速度パルス数を10000[pulse/s]に、距離パルス数を50000[pulse]に設定し起動。
(2023/6/14 現在)