福井工業高等専門学校 レゴ・マインドストームライントレース大会開催
観戦レポート
3月5日(金)14:00から福井工業高等専門学校の機械科2年生が、レゴ・マインドストームをNQC(C言語のようなプログラム言語)で制御して、自律型のロボットを使ったライントレース大会を行なうというので、観戦をしに行った。 ここでは、大会の様子を紹介していく。
場所は、福井高専の視聴覚ホール、時間になると、ぞくぞくと観戦者が集まり 始めた。機械科だけではなく、他の学科の生徒や先生も集まっているようだ
この大会は、「C言語基礎」の講義を終えた機械工学科2年生が、C言語学習の 最終課題としてレゴ・マインドストームをNQCで制御して、ライントレースロボットを作り、タイムやユニークさを競いながら、実体験を通してC言語の理解を深めるために開催された。

ロボット制御用プログラムを作成するNQCは「Not Quite C-Language」の略語で、 表記方法がC言語に近く、RCXを制御するための特殊な関数が多く用意されている。 C言語で関数を使ってプログラムするように、特殊な関数を使って、レゴ・マインドストームを制御する事ができる。
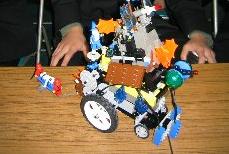
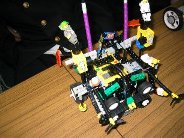
生徒達は、光センサで周囲の状況を判断しながら走るためのマシン(ハード)を レゴ・マインドストームで作成し、そのマシン(ハード)をNQCで作ったプログラム(ソフト)で制御した。
この様に、ハードとソフトの両面を同時に学習するのが特徴だ。
1年間を通してC言語を指導してきた、鈴木秀和先生がマイクを取り、早速大会 が開始された。
出場チームは13チーム、いずれも独特で楽しいロボットに仕上げてきた。 ロボットの形も、名前も、テーマソングもユニークで、会場内は笑いが絶えない面白い大会だった。
 鈴木先生
鈴木先生| 競技ルール |
|---|
これらを総合して、最終的に最優秀賞を決定した。 |
 ライントレースコース
ライントレースコース| レギュレーション |
|---|
|
 質問タイム
質問タイムモータとセンサを、それぞれ3つまで使えることにより、制御方法と機構部分の幅が広がり、四足歩行ロボットなどの複雑で面白い動きをするロボットが登場した。
大会途中の休憩時間には、マシンとマシンのPR資料や制御プログラムと共に、実際にマシンやプログラムを作成した生徒に話を聞く場があり、各先生方は、熱心に質問をされていた。生徒も、工夫点や難しかった点を熱く語っている姿が多く見られた。
マシン紹介
 チーム名:原口組
チーム名:原口組マシン名:ラストオサムライ
 チーム名:陸自 in サマワ
チーム名:陸自 in サマワマシン名:87式自走高射機関砲
 チーム名:乾と不愉快な仲間たち
チーム名:乾と不愉快な仲間たちマシン名:無駄
 チーム名:あたふた
チーム名:あたふたマシン名:四代目カカシ
●無駄は、上部の「宇宙」をイメージしたプロペラをまわしながら完走。
●四代目カカシは、ロボットを4回も作り直した事から名づけられた。ステアリングを使った制御だったが、残念ながらコースアウト。
 チーム名:高知競馬場 芝1500m
チーム名:高知競馬場 芝1500mマシン名:ハルウララⅡ世
 チーム名:ポンド=ブロック
チーム名:ポンド=ブロックマシン名:ざいうー号
 チーム名:地球に優しく
チーム名:地球に優しくマシン名:コスト削減
 チーム名:西山豆腐店
チーム名:西山豆腐店マシン名:86(ハチロク)
●ざいうー号は、作っていくうちに、ごてごてと装飾が付いて、この様な形になった。
●コスト削減は、キャタピラで着実な走りを目指した。
●86(ハチロク)は、コーナーの最小半径に上手く合わせてタイヤの大きさとシャフトの長さを決めて走らせる事で、光センサのセンシングの回数を減らしてスピードを落とさないまま、コーナーをクリアするように工夫した。
 チーム名:AAA
チーム名:AAAマシン名:轟
 チーム名:闘将 キッコーマン
チーム名:闘将 キッコーマンマシン名:デロリアハ~~ン
 チーム名:アバレンジャー
チーム名:アバレンジャーマシン名:アバレ車
 チーム名:仏陀同盟
チーム名:仏陀同盟マシン名:阿死門(ASIMON)
●デロリアハ~~ンは、クランク機構等を利用して、走りながら、手足が触覚のように動く。
 チーム名:ホリ
チーム名:ホリマシン名:ホリとゆかいな仲間たち
大会結果
○スピード部門
アバレ車は,光センサ3つを使い、軽量化されたマシンで、驚異的なタイムを出して1位となった。
| チーム名 | マシン名 | タイム | |
|---|---|---|---|
| 1位 | アバレンジャー | アバレ車 | 0.24.90 |
| 2位 | 高知競馬場 芝1500m | ハルウララⅡ世 | 0.30.77 |
| 3位 | AAA | 轟 | 0.33.34 |
 出走結果
出走結果
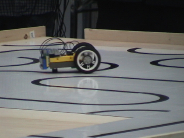 アバレ車の走りはこちら
アバレ車の走りはこちら
○デザイン部門
ラストオサムライは、ストーリ性のあるコンセプトで、 マシンのデザインを仕上げ、細部にわたるデコレーションでデザイン賞を獲得した。
| チーム名 | マシン名 | |
|---|---|---|
| 1位 | 原口組 | ラストオサムライ |
| 2位 | ポンド=ブロック | ざいうー号 |
| 3位 | 西山豆腐店 | 86(ハチロク) |
○テクニック部門
阿死門(ASIMON)は、この大会唯一の四足歩行ロボット、残念ながら、完走できなかったが、その独特な動きを披露していた。 かなり微妙な調節が必要で、メンバーは、ロボットの動きから、どの部分が悪いか瞬時に分かるという技を極めていた。
| チーム名 | マシン名 | |
|---|---|---|
| 1位 | 仏陀同盟 | 阿死門(ASIMON) |
| 2位 | アバレンジャー | アバレ車 |
| 3位 | 西山豆腐店 | 86(ハチロク) |

○総合結果
総合結果では、2部門で好成績を収めたアバレ車が1位になった。
| チーム名 | マシン名 | |
|---|---|---|
| 1位 | アバレンジャー | アバレ車 |
| 2位 | 原口組 | ラストオサムライ |
| 3位 | 高知競馬場 芝1500m | ハルウララⅡ世 |
アバレ車
記者感想
この大会に向けて、ほとんどの生徒は、放課後の8時まで残ったり、休日返上でロボットの製作や調整を行なったと、笑いながら話してくれた。自分達で、進んでやっていた様で、生徒達からは、楽しかった、面白かったという言葉が多くでていた。遅くまで作業をして、テレビを見ないで寝たのは初めてという程、熱中する生徒もいたようだ。
ロボットを上手く走らせるために、カーブでのモータのパワーや、光センサを調整して何度も走らせて、また、プログラムを修正するという作業を繰り返して本番を迎えた生徒達は、C言語の理解度が深まったと感じているようだった。
ロボットは、Case文を使って、光センサの状態の組み合わせを全て考え、それぞれの状態におけるロボットの動作を決めて、プログラムする事で制御していた。中にはdefine文を使って、モータ制御方法を記述し、関数のように使って、メンテナンス性をあげているチームもみられた。 生徒の中には、「プログラムを作ってエラーが出なくても、動かなかったら意味が無い」との声もみられ、実際の物を制御する難しさも体験したようだった。
1年間指導してきた、鈴木秀和先生は、ディスプレイの中で行なわれるプログラム言語学習は、どうしても忘れやすい。 今回の様な実体験を通して得た知識は忘れにくいと話す。現に、生徒からは、「case 文と while 文は絶対忘れない。」とコメントがあった。
鈴木先生は、今後、この様な体験が生徒達にとって、大きな財産になっていくと良いと思っている。今後もこうした授業をやって行きたいと、すでに次の構想を考えているようだ。
(軽部 禎文=永和システムマネジメント)


