教育・研究用6軸ロボットアーム DOBOT Magician E6
お問い合わせはこちらDOBOT
Magician® E6教育用
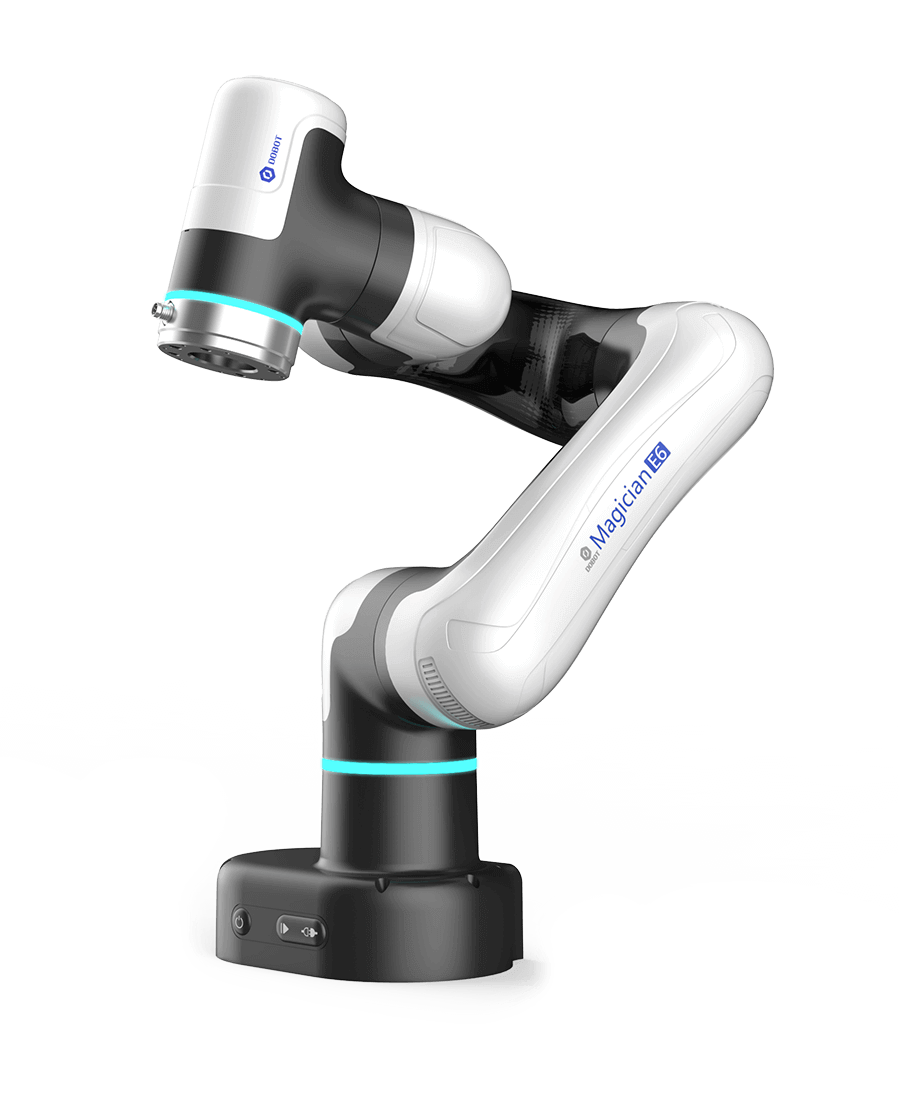
- 教育向けに最適化された、
卓上サイズの6軸ロボットアーム - DOBOT Magician® E6は、
教育機関向けに導入のしやすさを追求した、6軸のロボットアームです。
軽量かつ机上に設置できるコンパクトさでどの教室にも設置ができ、
導入しやすい価格は複数台導入を可能にし、学生一人当たりの実習機会を大幅に向上できます。
教育用ロボットアーム
DOBOT Magician E6の
活用シーン

ロボットアーム制御の基礎学習
指定した座標に動かす、ダイレクトティーチングで制御する、より効率のよい制御を実践してみるといった、制御の基礎学習におすすめです。

画像認識によるロボットアーム制御
画像処理、AI/IoTなど、産業界で活用が進むロボットやオープンソース技術について、実践的に学ぶことができます。

産業分野の技術を体験的に学ぶ
PLCやコンベヤを組み合わせ、現場を模した生産ラインの設計、運用、データ収集等、産業分野の技術を体験的に知ることができます。
Magician E6の導入メリット

01
導入しやすい価格で複数台の導入が可能、
実習機会の向上に生産現場で最も広く使われている6軸ロボットアームを基に設計された教育用モデルは、産業用レベルの性能を備えつつも低価格なため、予算内で複数台の導入が可能となり、学生一人当たりの実習機会を大幅に向上することができます。

02
卓上サイズで設置が容易、
複雑な配線は不要ですぐに使える電源が100V対応のためどの教室でも設置が可能、複雑な配線は不要なため電源を差し込めばすぐに使えます。また、超軽量(本体重量7.2㎏)で底面スペースがA4サイズ以下のため、持ち運びができスペースもとらず、簡単に設置ができます。

03
ダイレクトティーチングで制御が可能、
さらにプログラミングによる制御もダイレクトティーチングで制御が可能で、製造現場でロボットアームがどう動くかのイメージを持つことができます。また、プログラミングでの制御により、ワークの仕分けや検査工程を想定した制御を学ぶことができます。
産業用の標準的な機能を
兼ね備えた6軸

高い安全性
安全な操作のための衝突判定機能を備え、動作状態を簡単に監視できるライトインジケーターリングを搭載。
拡張性と互換性
吸盤、グリッパー、スライドレールなどの産業用エコ部品に対応し、利用シーンを柔軟に拡張することができます。
- 最大可搬質量750g
- 繰り返し位置決め精度 +-0.1mm
- 最大動作半径450mm
- 先端最大動作速度0.5m/s
- 本体重量7.2kg
| 自由度(軸数) | 6 | 電源入力 | 100V ~ 240V AC, 50/60 Hz |
|---|---|---|---|
| 通信インターフェース | イーサネット2個、TCP/IPおよびModbus TCP通信に使用 | 外部ポート | 非常停止スイッチx1、ABZエンコーダポートx1、電源ポートx1 |
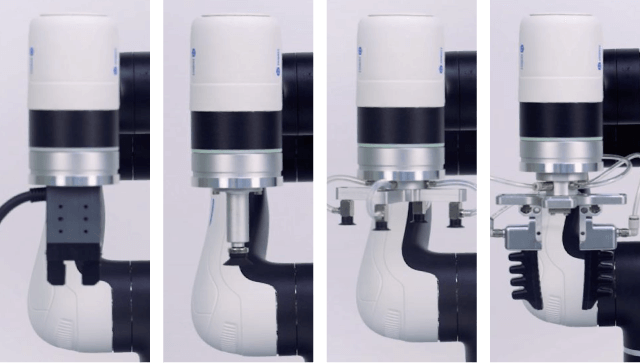
2種類のエンドエフェクタ
汎用性が高く、6軸をフル活用できる2種類のエンドエフェクタをご用意しています。

ES01 電動サクションカップ
Magician E6専用に開発された小型電動真空吸引カップ。 外部機器と接続せず、単体でのワーク吸着が可能です。 Magician E6本体セットに付属しています。
真空度:55kPa

小型電磁グリッパー
グリッパーの開閉を制御することでワークを把持します。 Magician E6本体セットには付属していませんが、 小型電磁グリッパーを含むセットがございます。
最大把持力:10N
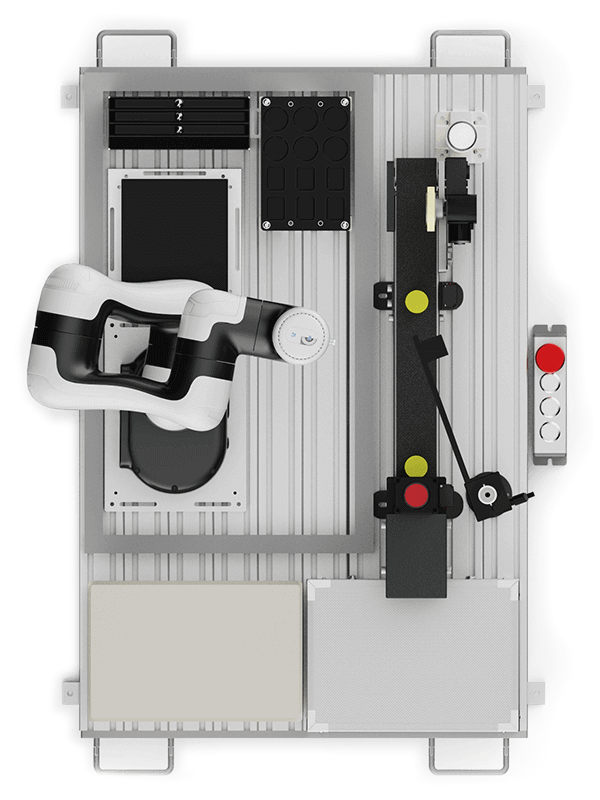
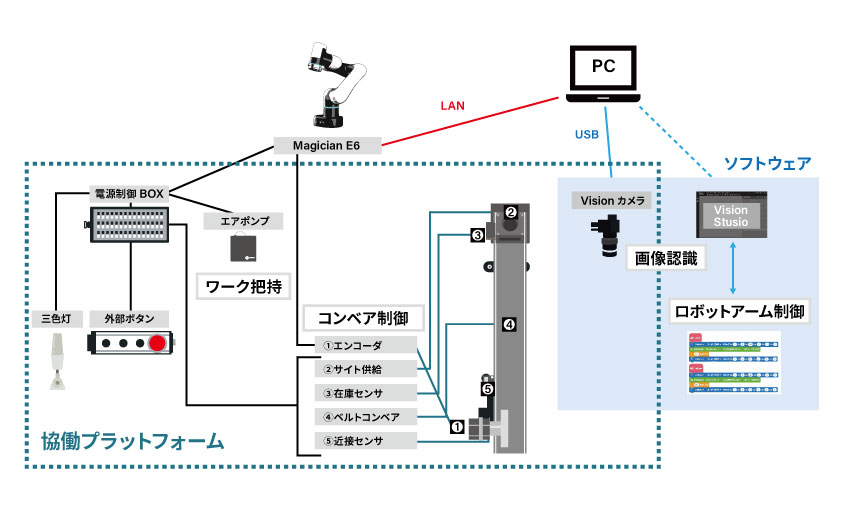
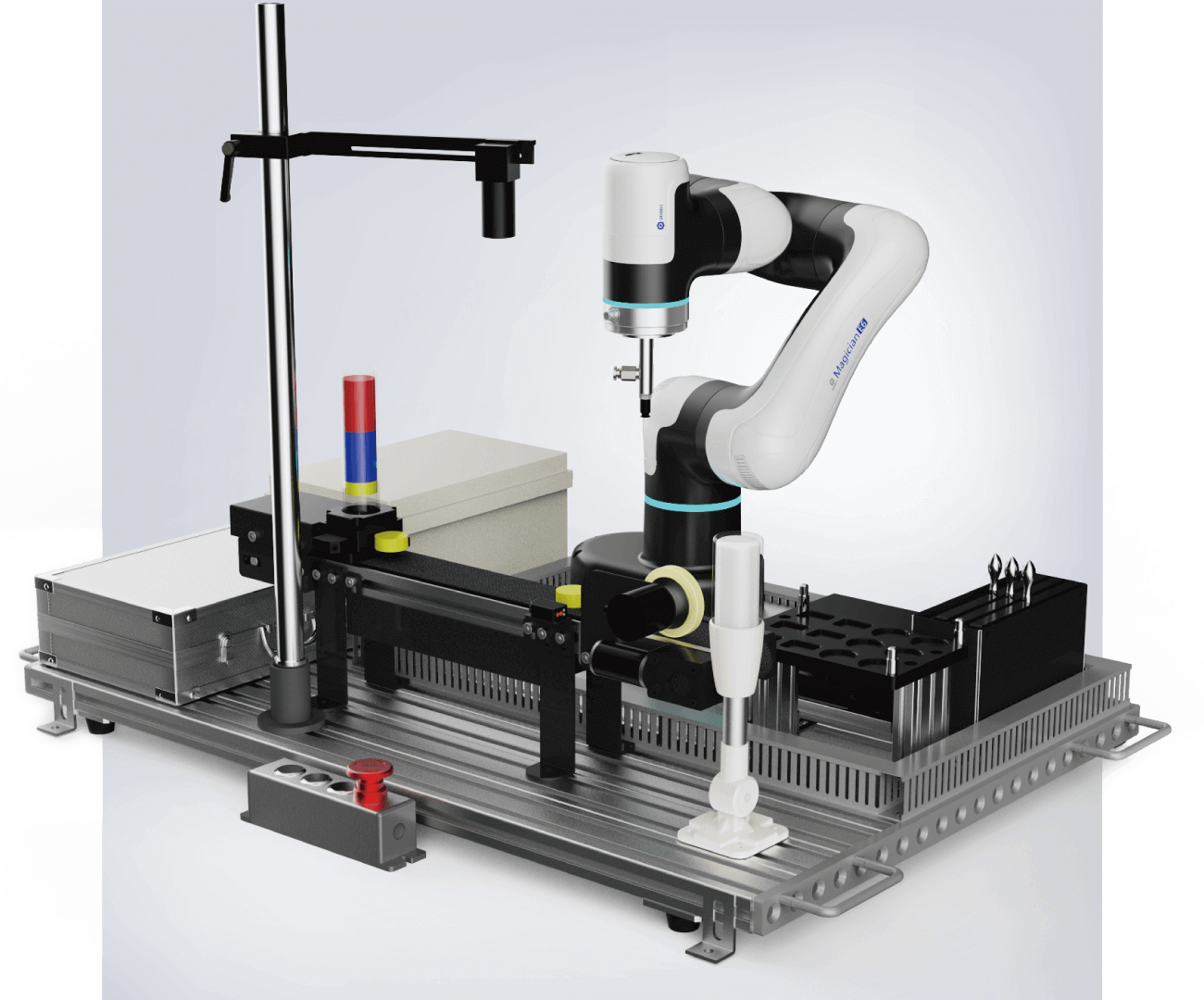
プラットフォームモジュールでさらに学びを深化
ロボット、制御システム、視覚システム、コンベアベルトなどのコンポーネントを統合した教育プラットフォーム
- 物体検出
- 把持
- ハンドリング
- 検査
- パレタイズ
- 組み立て
- 「協働ロボットユニバーサルトレーニングプラットフォーム」は、ロボット、制御システム、視覚システム、コンベアベルトなどのコンポーネントを統合した教育プラットフォームです。モジュール設計で柔軟かつ簡単に組み合わせ、さまざまな⾃動化シミュレーションや、ロボットシステムのキャリブレーション、軌道追跡、通信制御などの教育プロジェクトを⾏うことができます。
授業設計に活かせる、
基礎から発展までの教材構成
制御技術の基礎から、授業設計に活用できる応用課題、AI・画像認識を活用した先端技術の学習まで、
教育現場での実践的な展開を支援します。
基礎 |
実践 |
AI |
||
|---|---|---|---|---|
 |
 |
 |
 |
 |
基礎
6軸制御の基本を習得
「DOBOT Magician E6」を専用ソフトウェア「Dobot Studio Pro」を用いて制御する方法を学ぶアフレルオリジナルのガイドブック。
ハードウェアセットアップからプログラミング制御までの基本的な動作や6軸ロボットアーム特有の動作方法を学ぶことができます。

DOBOT Magician E6 マスターガイド
フルカラー 82ページ
【内容】
- DOBOT MagicianE6 の特徴
- 安全に使用するために
- ハードウェアの準備
- ソフトウェアの準備
- Dobot Studio Pro の基本操作
- Dobot Studio Pro でのプログラム作成方法
- 6軸の
特徴的な制御 - 専用ソフト
プログラミング - エンドエフェクタ
制御方法
Pythonでの制御も
DOBOT Magician E6 Pythonマスターガイド
フルカラー 80ページ
【内容】
- DOBOT MagicianE6 とは
- 安全に使用するために
- Dobot Studio Proの基本操作
- Pythonを使用したプログラム作成方法
- ロボットアームの制御プログラミング
- 6軸の特徴的な制御
- 今後ますます重要になるPythonを使ったロボット制御スキルを、実践的に学べます。Pythonによるプログラム作成方法をわかりやすく解説しています。
テキスト言語に移行するための導入教材としても最適です。
将来的に、AIや画像認識の実習で活用されることも視野に入れていただけます。
- 6軸の
特徴的な制御 - Pythonを使用した
プログラム作成方法 - エンドエフェクタ
制御方法
実践
授業の組み立てに役立つ
実践的な制御課題集
ネジ締めやパレタイズなど、産業界で実際によく使われている実践的な制御を取り入れて構成。
システム構成別で2冊に分けて<13テーマ>設定しています。
ロボット+エンドエフェクタの構成で取り組む

6軸ロボットアーム 制御実践課題集
E6応用編
フルカラー 64ページ
【内容】
- 缶の蓋を閉める
- 狭い空間を通してパレタイズを行う
- パイプを窪みにはめる
- 曲面をなぞる
- 土台を傾けモノを寄せる
- (ロボット制御中心)ワークの向きを変え再整列
- 6軸ロボットアームならではの三次元空間の動作設計を中心に、ロボット+エンドエフェクタの構成で取り組む【6つのテーマ】を掲載。実機で試行錯誤しながら実践的に学ぶことができます。
- サンプル
プログラム - サンプル
動画 - 6つの
テーマ
オールインワンのプラットフォームで取り組む

6軸ロボットアーム 制御実践課題集
協働プラットフォーム活用編
フルカラー 102ページ
【内容】
- (コンベア制御中心)ワークの向きを変え再整列
- 外部ボタン制御で自動再整列
- センサーでワークを検知しコンベアを止める
- コンベア追従型ピッキング
- ビジョントラッキングで色を判別して仕分けする
- ビジョントラッキングで形を判別してピッキングする
- ビジョントラッキングで不良品を判別してピッキングする
- 6軸ロボットアームならではの三次元空間の動作設計を、ロボット+ビジョン、コンベアなどがオールインワンの教育プラットフォームで取り組む【7つのテーマ】を掲載。産業界でよく使われている実践的な制御を取り入れて学ぶことができます。
- サンプル
プログラム - サンプル
動画 - 7つの
テーマ
AI
ロボットアーム制御と画像認識AIを
一体化した実習に
ロボットアーム制御と画像認識AIを一体化した実習により、
生産現場で実際に求められるデータとAIを活用したロボット運用技術を体験することができます。

6軸ロボットアーム
AI×画像認識×ロボットアーム制御
2025年9月新発売
※出荷開始は2026年2月内容
- ロボットアームの特異点
- 電気配線上の注意
- 設備システム構築・運用の際の注意点
- 本書サンプルプログラム動作テスト時の安全対策
- Pythonによる基礎的なロボットアーム制御
- 画像認識AIとロボットアーム制御
- Pythonでの基本的な操作方法から、AIによる画像データの学習方法まで解説。さらに、AIを用いない画像認識方法である「パターンマッチング」と、汎用性が高いAIモデルであるDNN(Deep Neural Network)を用いた画像解析を比較しながら学ぶこともできます。
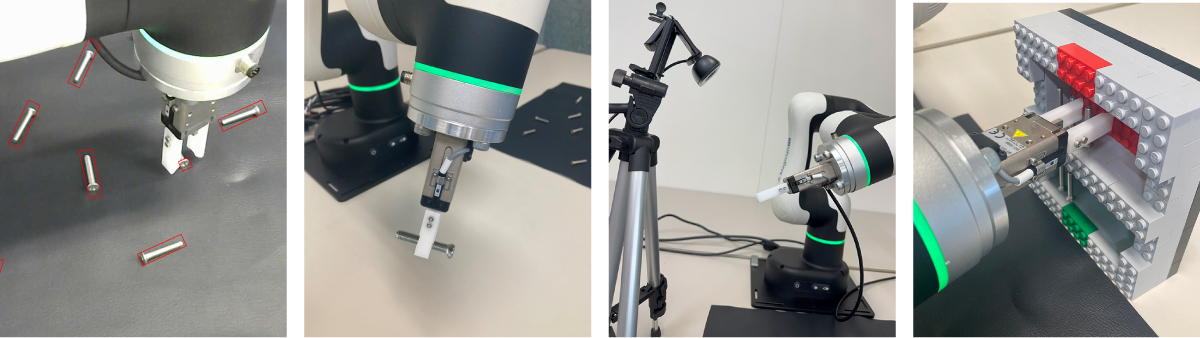
▼学習の大まかな流れ
1)DNNを用いて画像認識を行い、ワーク(ねじ)を仕分けする (仕分け作業の流れ)
- ①ワーク(ねじ)をグリッパを装着したロボットアームでピック
- ②ロボットアームでワークを動かしながら、定点に設置したカメラで多角度から撮影し、2D画像データで物体を認識
- ③カメラで読み取った画像を用いて、AIで【良品/不良品】解析
- ④解析結果に応じてワークを棚に設置
2)パターンマッチングでAIを使用しない仕分けを体験する
3)AIによる仕分けの特徴を理解する
製品ラインナップ

DOBOT Magician E6
スタートセットA
本体セットにガイドブックを付属。すぐに動かすことができ、迅速な学びに最適。

DOBOT Magician E6
PythonセットB
6軸をフル活用できる2種のハンド付、スムーズに使用したい方に最適
協働ロボットユニバーサル
トレーニングプラットフォーム
制御・視覚システムなどのコンポーネントを統合した教育プラットフォーム
豊富な実績
アフレル 教育機関へのロボットアーム製品 導入実績
- ■機械・工学系
- 工学部、情報工学部、理工学部、創造理工学部、システムデザイン学部、
システム工学部、デザイン工学部、ロボティクス学科、メカトロニクス科、
機械システム工学科、機械工学科、産業技術専攻科、宇宙・ロボット学科 - ■電気・電子系
- 電子制御工学科、電子工学科、電子制御工学科、電気制御システム工学科
知能電子システム科、生産電子情報システム技術科、電子情報技術科 - ■文理融合型
- 創生学部、社会共創学部、人文社会学部、情報文化学科、芸術工学研究科
- ■大学院
- 大学院情報学研究科、大学院工学研究科マテリアル生産科学、
大学院生命体工学研究科、 他
安心の保守サポート

初期サポートから保守まで幅広く対応
導入後の初期サポートから、技術的な質問やご相談、保守対応など、初めてロボットアームをご使用になる方にも安心して導入いただけるサポート体制を整えています。