2022年8月4日
スライダーレールを動かす (Pythonの場合)
DOBOTには、拡張機器(別売)としてスライダーレールキットがあります。
モーター駆動式の左右スライド機構により、DOBOTの作業範囲を大幅に拡張できます。

接続方法について
本体の組立方法はキット付属のマニュアルを参照ください。
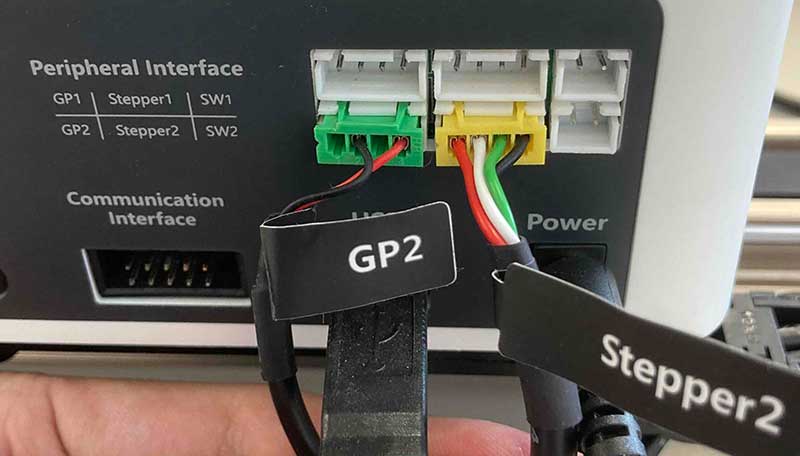
1) Stepper2ケーブル(モーター接続)をStepper2端子に接続します。
2) GP2ケーブル(リミットスイッチ接続)をGP2端子に接続します。
- スライダーレールのバージョンを以下の手順で確認します。写真は色付きなのでV2.0です。
- 端子の色なし (Stepper2白 / GP2 白):V1.0
- 端子の色付き (Stepper2黄 / GP2 緑):V2.0
動かし方 (初期設定)
電源を入れる前にDOBOTの位置をスライダーレール右端に寄せてください。電源投入時またはHOMEポジション復帰操作時点の座標がスライダーレール0[mm]原点となります。

HOMEポジション復帰命令を実行した場合は、DOBOTがスライダーレール右端に自動復帰し、HOME姿勢になります。
動かし方 (Pythonで制御) ※64bit版
サンプルプログラムをダウンロードしてお試しください。
- 各プログラムにおいて、PC接続中のUSBのCOMポートを指定してください。下記では”COM8”。
state = dType.ConnectDobot(api, "COM8", 115200)[0]
プログラム動作解説
- スライダーレールを有効にする
スライダーレールのバージョンに応じて引数を変更してください。
V1.0の場合
dType.SetDeviceWithL(api,True, 0)
V2.0の場合
dType.SetDeviceWithL(api,True, 1)
- スライダーレールの速度を100、加速度を100に設定する
dType.SetPTPLParams(api,100, 100, True)
- DOBOTをHOMEポジションへ移動
dType.SetHOMECmdEx(api, 0, True)
- スライダーレールを座標100[mm]の位置へ移動 (HOMEポジションが0[mm]原点となる)
dType.SetPTPWithLCmdEx(api,PTPMode.PTPMOVLXYZMode, 200, 0, 0, 0, 100, True)
DOBOTのHOMEポジション座標はX:200, Y:0, Z:0, R:0に設定中
参考テキスト
Pythonでロボットアームの制御を学びたい方へおすすめの教材です。
(2022/7/5 現在)