2025年6月25日に行われた、主に高等教育機関におけるロボット実習で使用できる教材「6軸ロボットアーム 制御実践課題集」について教材開発者自ら解説を行ったセミナーアーカイブです。
この課題集は、製造現場でよく見られる“自動化のあるある”13シーンを実習課題として収録。三次元空間での動作設計や画像認識によるピッキングなど、実践的なロボット制御を学ぶことができます。教材は2種類あり、基本的なロボット構成で取り組む「E6応用編」と、ビジョンカメラ・コンベア等を活用する「協働プラットフォーム活用編」をご用意しています。
本記事では、セミナー講演内容より、【テーマ設定の意図】や【課題ごとの難易度設定】、【学びのポイント】など教材に込められた要素といった点についてレポートしています。ぜひ最後までお読みください!
※株式会社アフレルの谷口、伊坂によるセミナー講演内容を一部抜粋して記載しています。
現在、国内で最も普及しているロボットアームは6軸です。そして産業界では様々なメーカーのロボットが普及しています。しかし、それぞれが個別の仕様で開発されていて、各メーカーに依存したロボット知識では多様な現場に対応できないこともしばしば。
また教育機関の先生方からは、「教育の場では各メーカーの仕様に依存した学習ではなく、6軸ロボットに共通した特徴や制御を学ばせたい」というお声や、「高価な産業ロボットでは1,2台しか学校に設置できず、しかも動かすための安全教育にすごく時間がかかり、実際に実習で動かせる時間は少ししかない」というお声をお伺いしてきました。
そんな状況を変えるモノを開発できないか…というのが今回の開発に至った背景です。アフレルでは6軸ロボットアームの実習をテーマにして、3人で1台もしくは「1人で一台」実習で動かせるような時代づくりに向けて先生方と一緒に活動していきたいと考えています。
そういった実習のご支援を実現するために採用しているロボットというものが「DOBOT Magician E6(以下、E6)」というロボットです。特徴としては大きく以下の三つです。
こういった特徴を持つロボットを採用することで、学習者一人あたりの実習時間を増やすことが可能です。そして、沢山の時間ロボットを動かせる分、実習の課題がより重要になります。
今回のセミナーで解説する「6軸ロボットアーム 制御実践課題集」は、実習機会を多く持ち、更に社会で活躍できる「多様な自動化」に対応できる人材育成を目指す先生方を支援するために開発された教材です。「よくある自動化支援シーン」を題材にして、「制御の考え方」から「動作設計」までを実機を用いた実習形式で学べる課題集となっています。
ここからは教材の開発者である伊坂にバトンタッチして、実際にどのような観点で開発を行ったのかといったところを解説させていただきます。
「制御実践課題」とは、E6を活用したロボット演習型の課題です。ロボットアーム制御に必要な思考力と設計力を、実践的な課題を通して学べる内容になっています。目的に応じて取り組めるようE6用編と協働プラットフォーム活用編という二種類のテキストをご用意しています。

この課題集は、「E6」の基本的な制御※を学んだ後に、次のステップとして「どう動かすかを自分で考える制御」に取り組んでいただく教材です。つまり「ピックアンドプレースができたら終わり」ではなく、そこから更に一歩進んで、「動作の工夫・構成」といった「設計」の力を育てることを目的としています。
※「E6」の基本的な制御は【DOBOT Magician E6マスターガイド】で学ぶことができます。
教材に収録されている課題は全部で13テーマです E6本体のみで構成される「E6応用編」の全6課題と、外部機器と連携する「協働プラットフォーム活用編」の7課題に分かれています。制御実践課題集の特徴を一言で表すならば、「授業内容や学習の狙いに合わせて自在にアレンジできる課題集であること」です。

教材に収録されている課題は、それぞれが異なる系統に分れていて、フォーカスする視点や扱う制御技術が異なります。単に課題数が多いというわけではなく、多角的なアプローチで制御を学べる構成になっているのがポイントです。
こちらには、「缶の蓋を閉める」、「曲面をなぞる」などの全6つの課題が収録されています。すべてE6本体の操作をメインとした課題で、「ロボット単体の操作や設計スキルを深めること」に特化しています。例えば、「この向きで物を掴みたい」や、「このルートで障害物との干渉を避けたい」といった動作のイメージをゴールにして、姿勢や経路など速度など様々な要素を考慮しながら試行錯誤を重ねていく内容となっています。
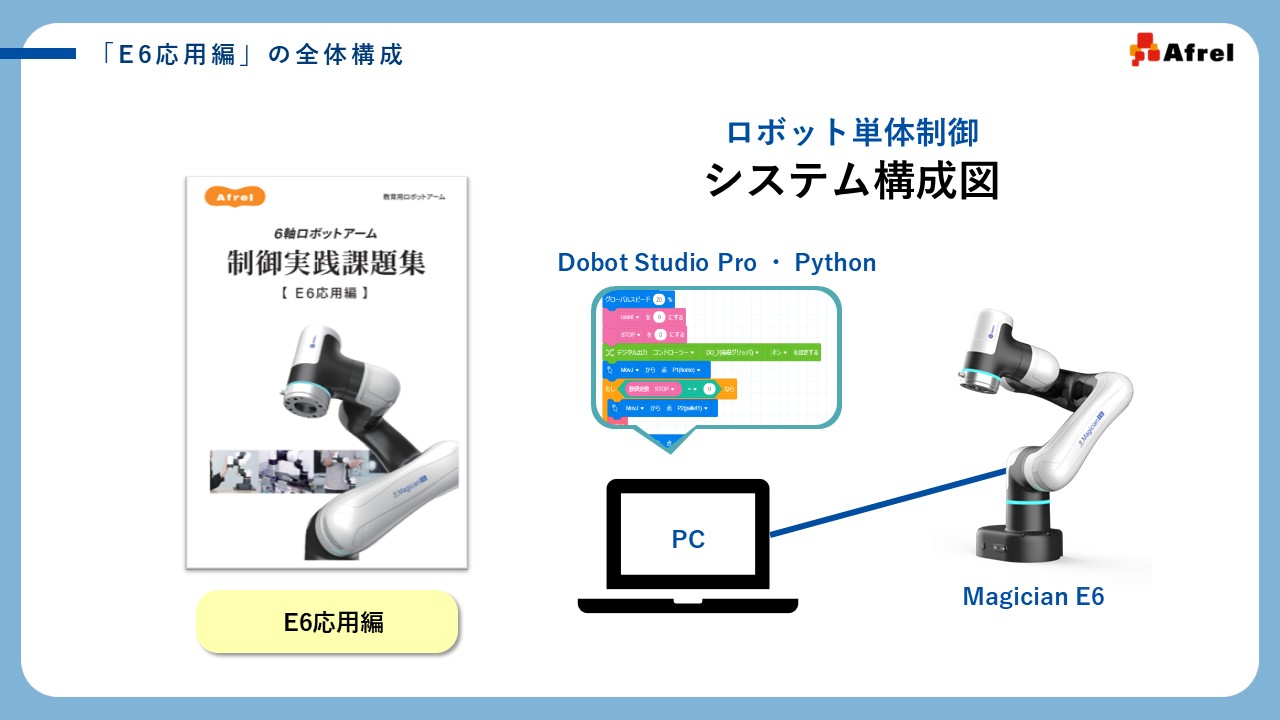
※E6単体制御のシステム構成図
使用する機材はパソコンとE6本体のみで それをランケーブル1本で接続することができます。専用の「Dobot Studio Pro」または Python環境を使用することができるので、用途に応じてプログラミング言語を選ぶことができます。その一方で構成自体はとてもシンプルなので、ロボットの動きそのものに集中することができます。ただプログラムを組むだけで終わらず、動作を設計するという視点を育てる、それがE6応用編の大きな特徴です。
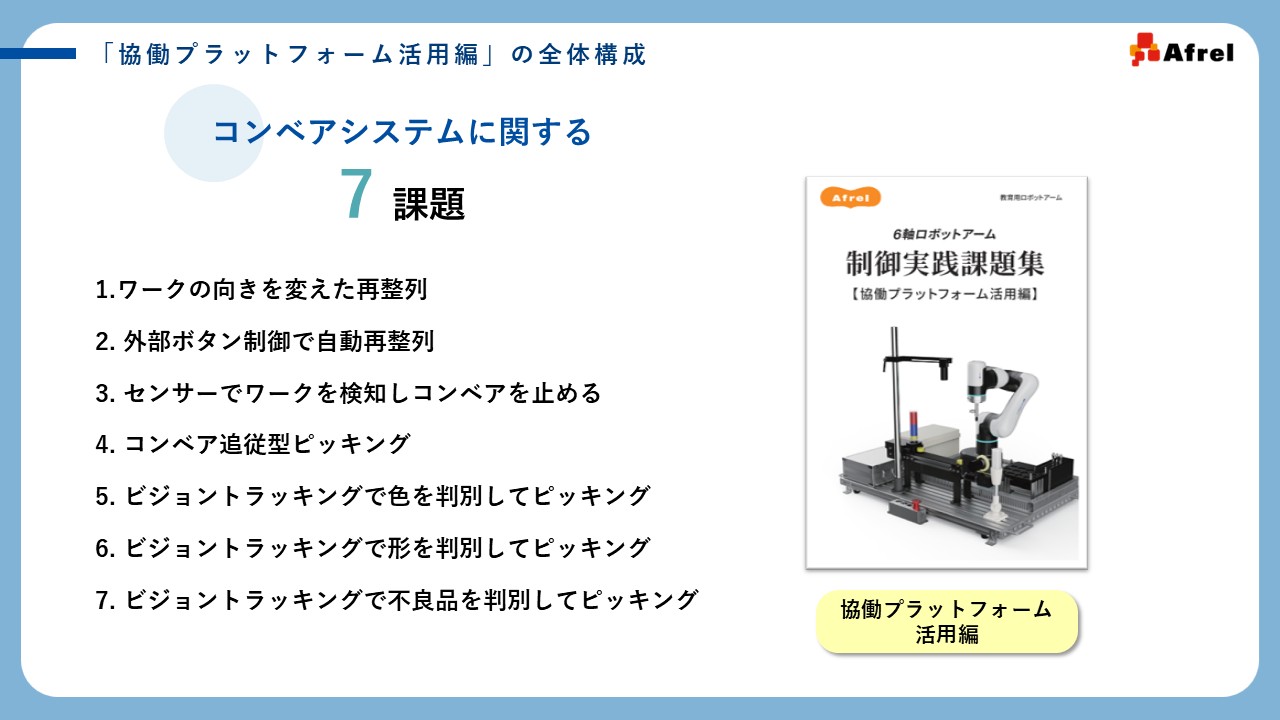
協働プラットフォーム活用編には、「センサーでワークを検知しコンベアを止める」や、「ビジョントラッキングで色を判別してピッキング」など全部で7つの課題が収録されています。これらは全て協働プラフォームという専用のキットを使用した課題です。
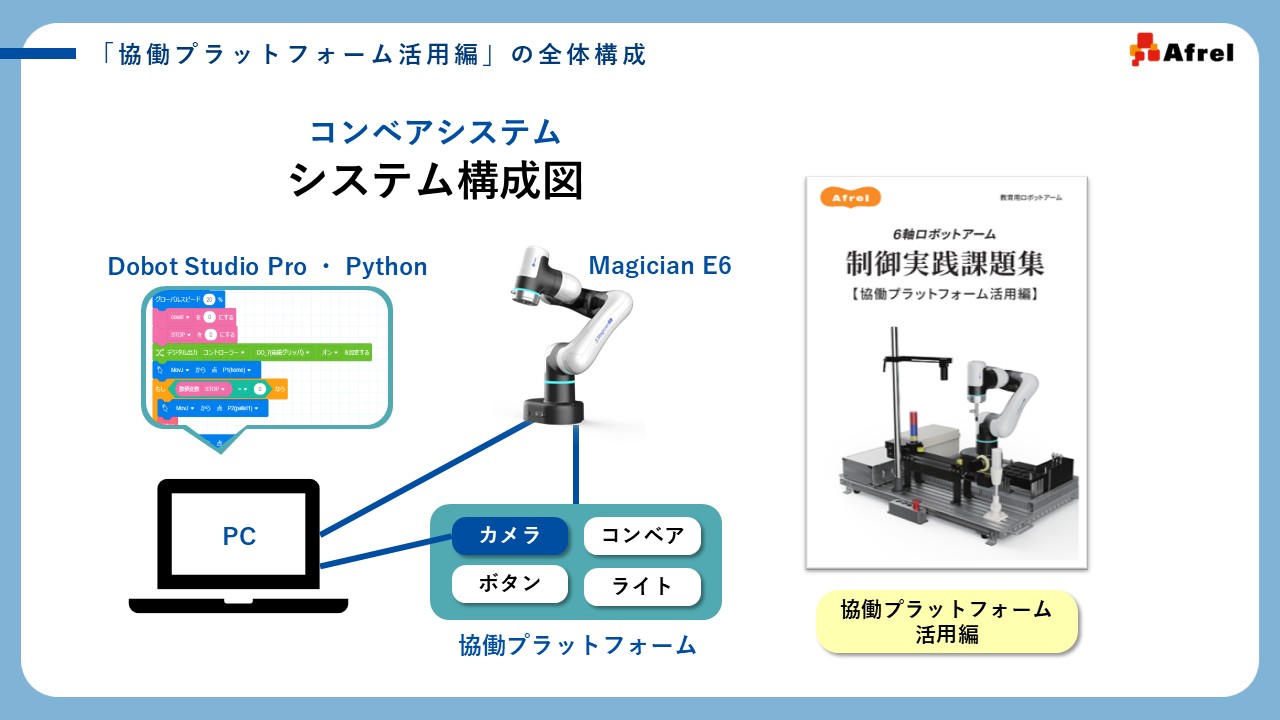
※コンベアシステム システム構成図
システム構成はパソコンとE6本体と協働プラットフォームの3つから成り立ち、プラットフォームの中にセンサーやコンベア、カメラなどが付属しています。このプラットフォームではE6から命令を送り、コンベアやライトなどの外部装置を動かしたり、パソコンからカメラ情報を取得して動作判断に生かすといったこともできます。テキスト内の課題では、情報を取得した後それを判断して動作に反映する、といった自立的な制御の流れを体験できる仕様になっています。 ロボット1台では完結しない複数の機器で構成される、「システム全体を設計する視点」がこの教材では求められます。ロボットをどう動かすかだけではなく、周辺機器とどう組み合わせてどんな条件で動かすのかという、システム全体の設計方法を学ぶことができます。
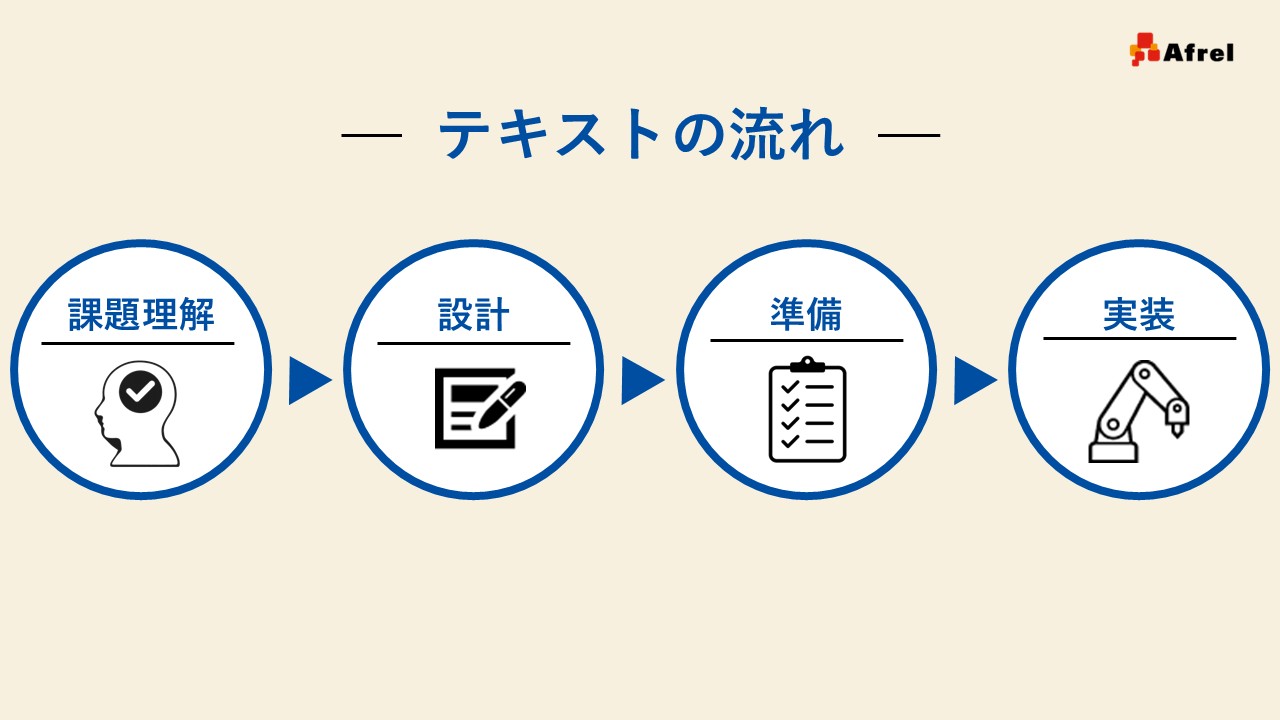
この課題集では、ロボット制御の学習を次の4つのステップで進める構成になっています。
このステップを課題ごとに繰り返すことで、単なる操作にとどまらない、「設計の視点から考える力」が自然と育まれる構成になっています。
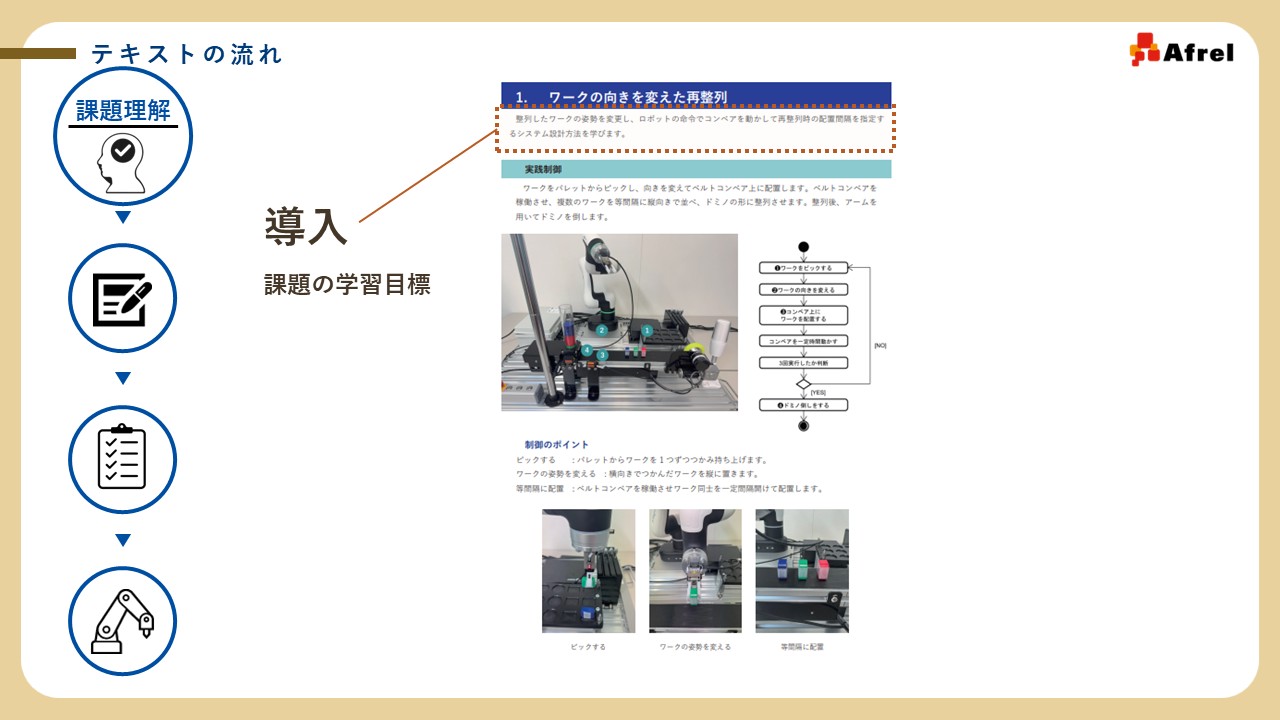
課題の冒頭には、導入文が記載されています。その課題で何を学ぶのかという学習目標を示したもので、単なる作業で終わらないよう学習の意図を意識づけるために記載しています。
問題文では、課題の概要が書かれています。あえて細かな条件や作業手順までは示さず、ざっくりとした到達目標のみ示しています。これには、学習者自身の自由度のある設計思考を自然に引き出すという意図があります。

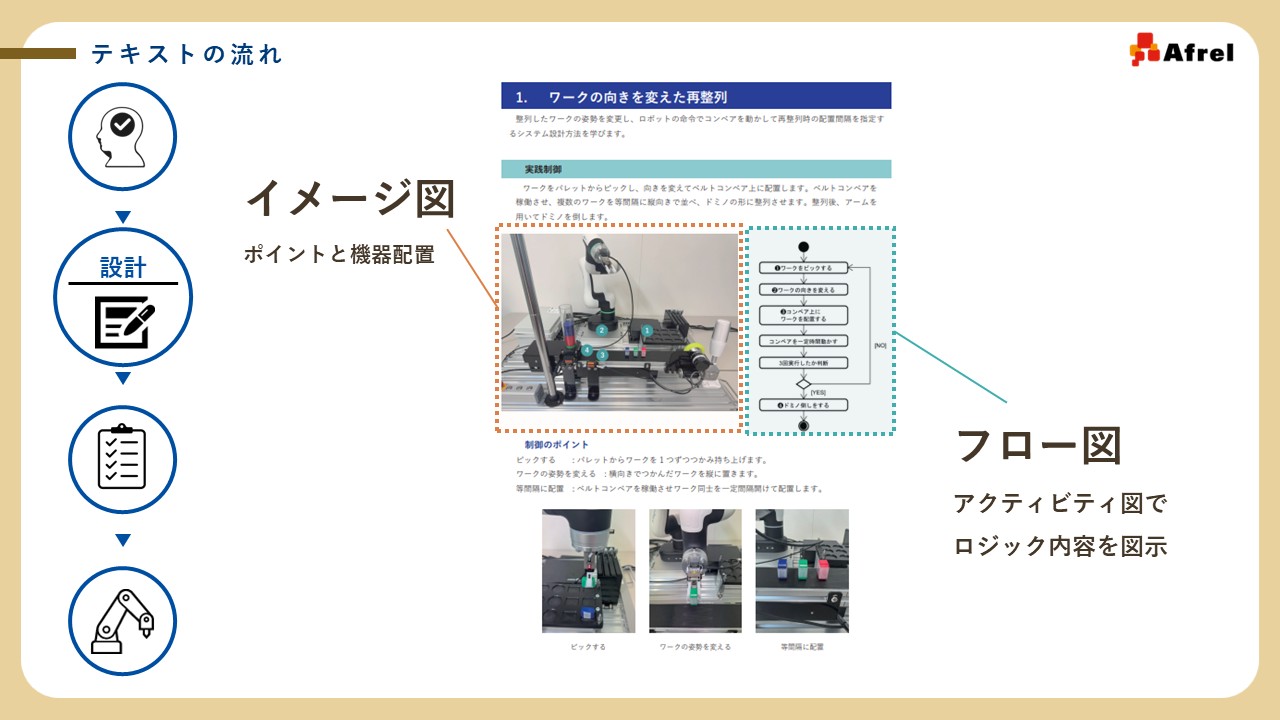
動作フロー図には、提供しているサンプルプログラムの流れをアクティビティ図の形で整理しています。これは、プログラムの流れや条件分岐の構造を図として視覚的に表現したものです。どの条件で判断が行われているのか、その結果としてどんな動作に分岐するのか…そういったロジックが視覚的に把握できるようになっているのがポイントです。また、課題のプログラムでは、あらかじめ移動させたい座標をポイントとして登録し、そのポイントに移動させる命令を使用していますので、イメージ図では各ポイントも明示しています。処理の流れと実際の動作位置の関係が目で見て分かりやすいので、動作全体のイメージをより具体的に捉えることができます。
制御のポイントでは、各課題の中でも特に意識して取り組んで欲しい動作や構成要素をピックアップしています。例えば6軸ロボットならではの姿勢制御や、外部機器との連携動作など、実際の実行時に重要になる項目を取り上げています。もし一連の処理を最初から自分でやるのは難しいという場合でも、この制御のポイントを1つずつ参考にすれば、必要な動きを分解しながら再現していくことが可能です。基本的な動作に分解されることで、一見複雑そうに見える動きも実はシンプルな要素の組み合わせだという感覚が自然と身についていきます。

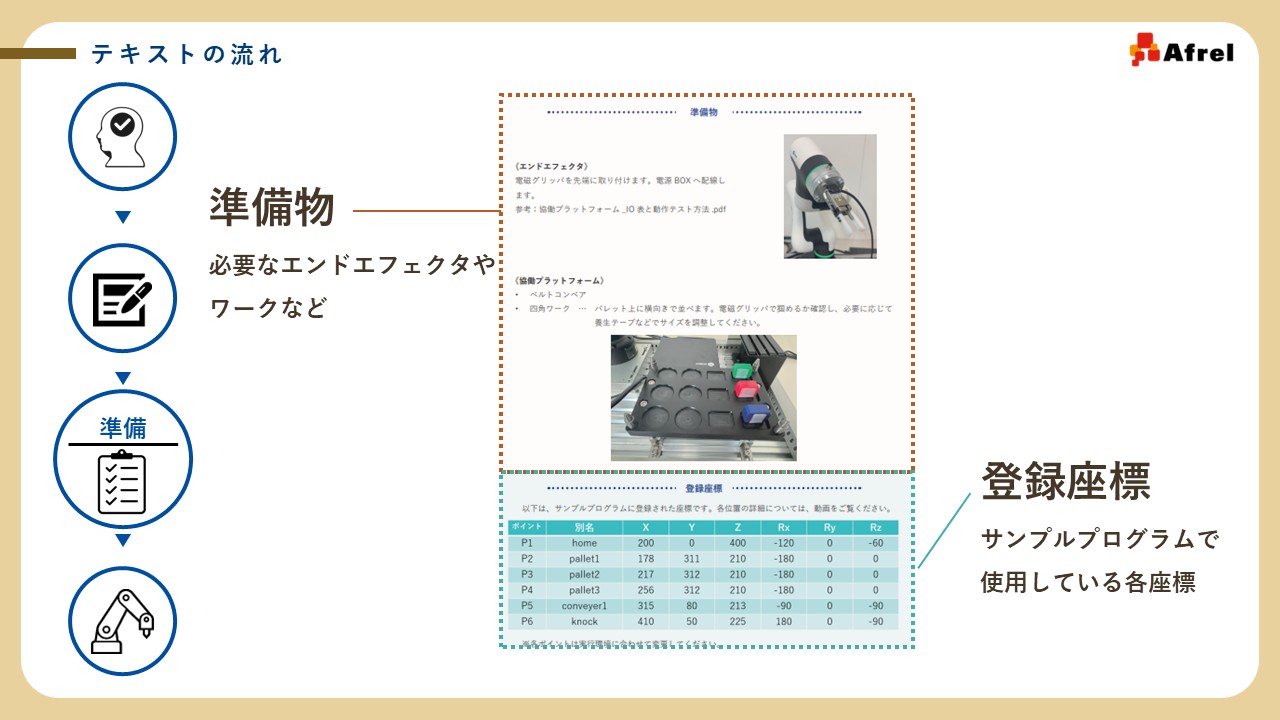
準備物欄には、その課題に必要なエンドエフェクターやワーク類が一覧で整理されていて、授業前に段取りを確認する上で役立ちます。この欄を見ながら必要な準備を整えれば、すぐに実機での動作に取りかかることができます。
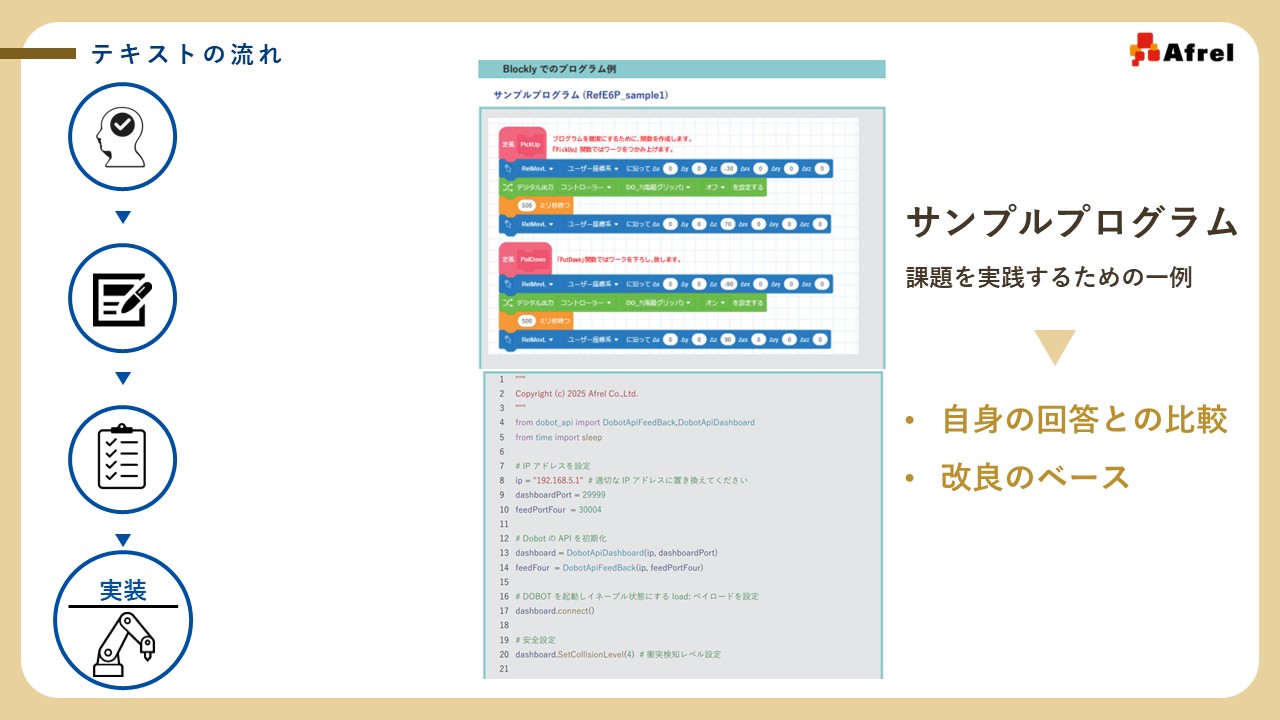
サンプルプログラムは単なる模範回答ではなく、例えば学習者が自分で作ったプログラムと比べながら、どこが似ていてどこが違うのか、考え方に違いはあるのか、といった視点で活用することで、様々な構成のパターンやアプローチに気づくことができます。 まずサンプルプログラムで動かしてみて、その後に自分で試しながら動きを理解し、改善点を見つけて自分なりにアレンジしてみる、という体験ベースで理解を深めていく使い方もできます。「正解をなぞるためではなく、考え方を広げるきっかけになる素材」として活用いただけるプログラムです。
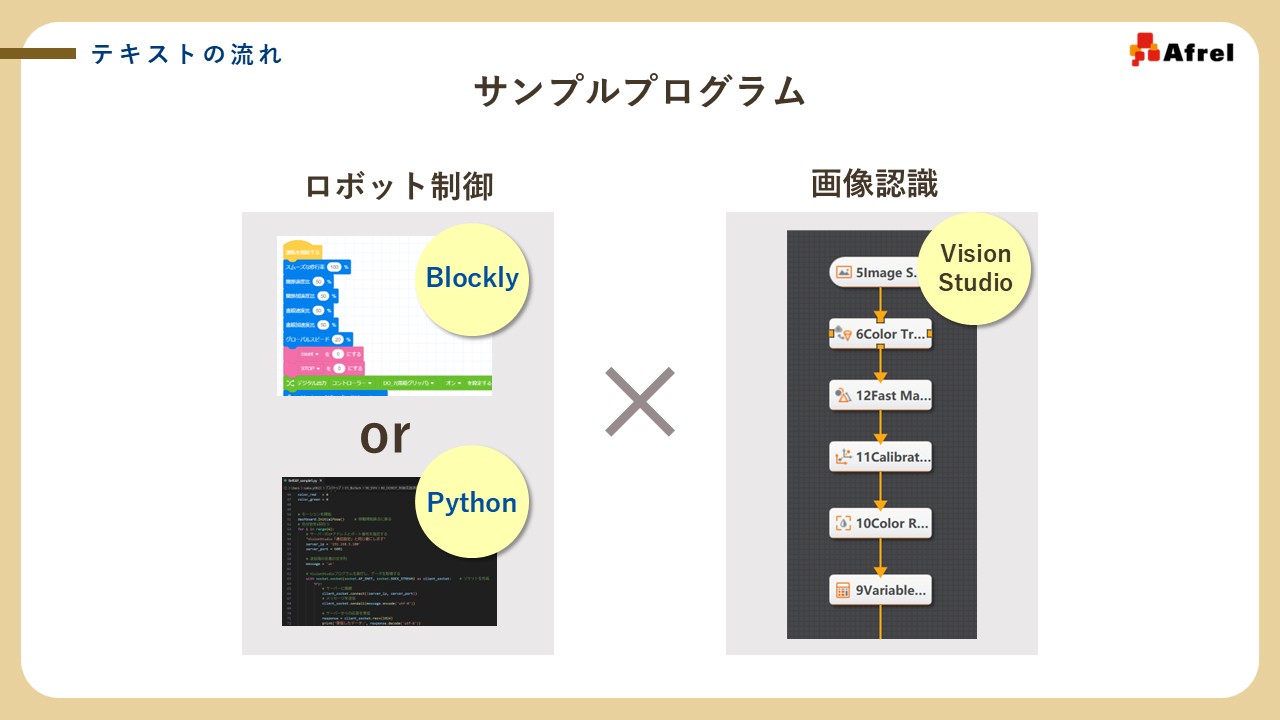
各課題には、BlocklyとPythonそれぞれの言語でサンプルプログラムを用意しています。学習者の学習レベルや授業の目的に応じて、どちらか使いやすい方を選んでいただけます。更に画像認識を扱う課題では、これらのサンプルプログラムに加えてVisionStudioという専用ソフトウェアも使用します。
プログラムを書いたり資料を揃えたりといった授業準備の負担軽減に役立つダウンロードコンテンツ(以下DLCと記載)もご用意しています。DLCにはサンプルプログラムファイルや参考資料、動作動画が含まれており、テキストに記載されたURLからいつでも閲覧ダウンロード可能です。
「サンプルプログラムファイル」では、各課題に使用するプログラムをダウンロードすることができ、授業前に自分で動作を確認し、改造や検証を行うことができます。プログラムを1から作る必要がなく、すぐに試せるのがメリットです。
また、組み立て・外部機器のI/O確認といった授業前のセッティング作業についても、DLC内の「参考資料」にて詳しい手順をご紹介しています。協働プラットフォームの設置方法や画像認識のプログラム解説など、 必要な情報がそろっていますのでスムーズに準備を進めていただけます。
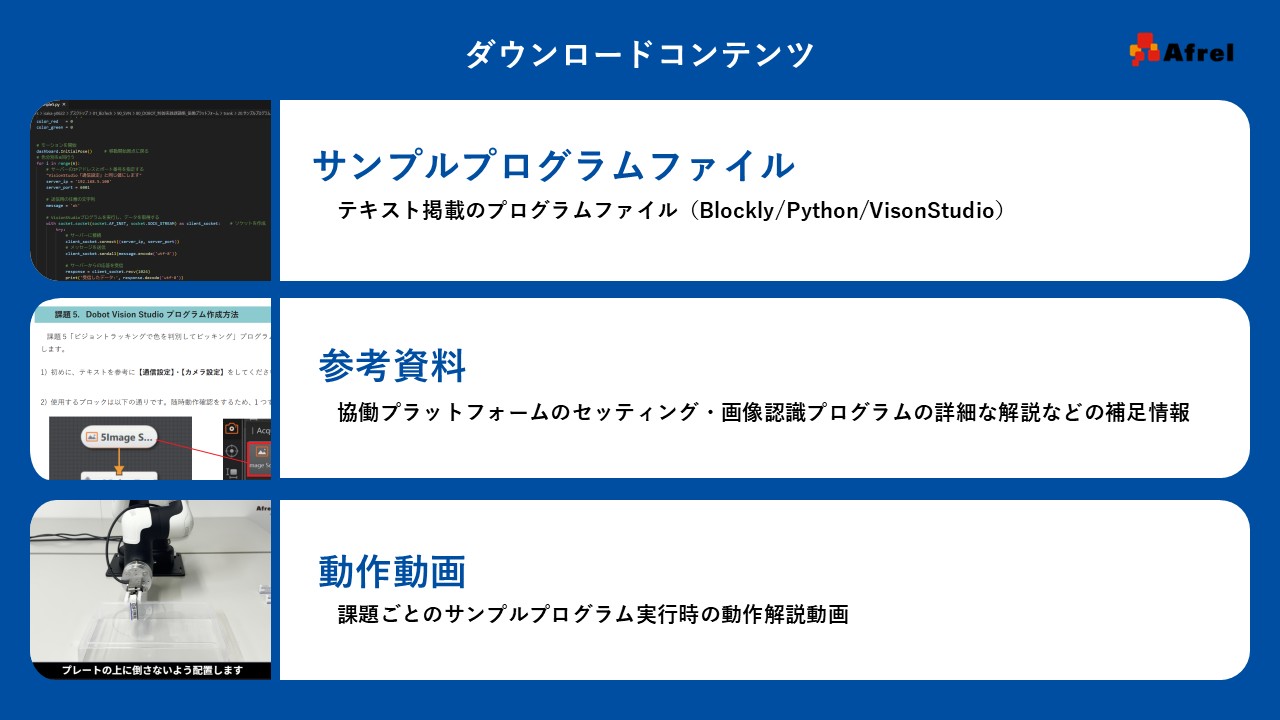
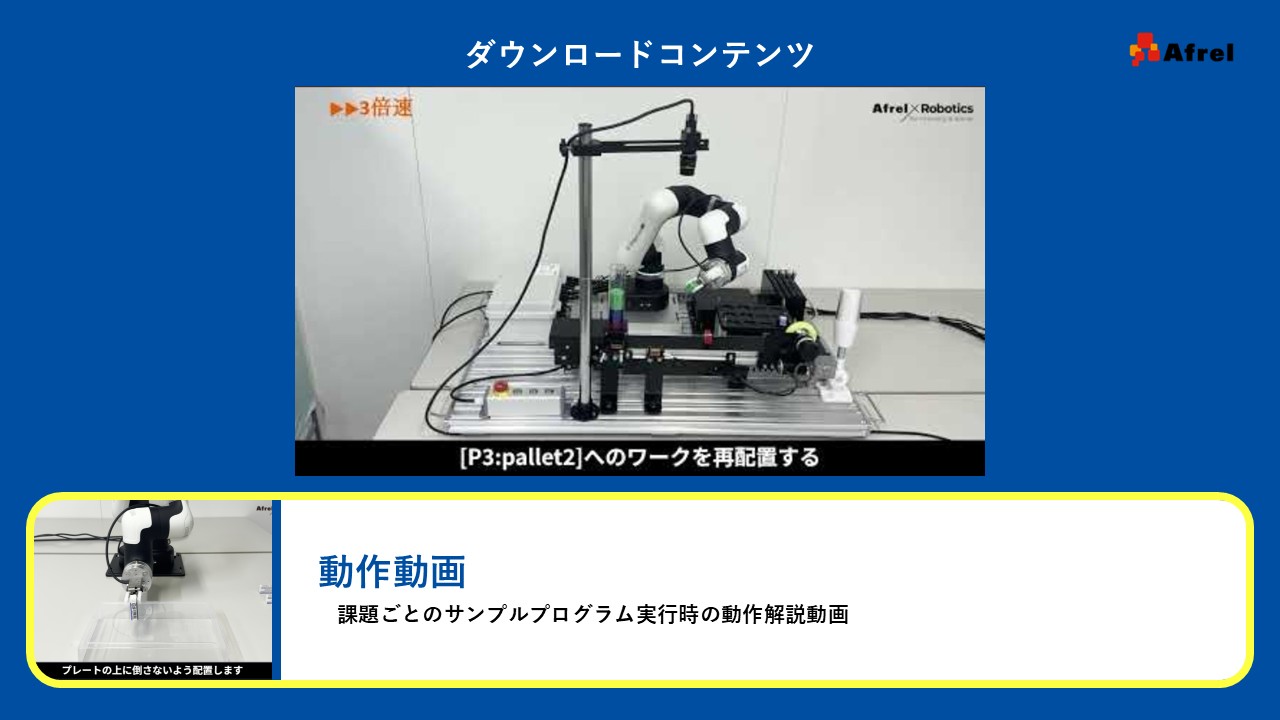
「動作動画」では、各課題のサンプルプログラムを実行した実際の映像をご覧いただけます。複雑な動きも直感的に確認することができるので、例えばどのタイミングで姿勢が切り替わったのか、外部機器との連携でどのような感じで動作が変化したのか、といった細かな動きの流れも、映像を通してしっかりと把握できるようになっています。
このようにDLCは、教える側と学ぶ側、双方の理解を深めるサポートツールとなっています。
E6応用編と協働プラットフォーム活用編、その違いは使う機材だけではなく、育てたい視点や求められる設計思考にも違いがあります。
すばり、「将来、実務に活きる、6軸ならではの動き」を学ぶことができます。 E6応用編では、6軸ロボットアームならではの高度な動きに焦点を当てています。4軸では難しい立体的な動作をスムーズにこなせるのが6軸ロボットの大きな特徴です。実際、このテキストの課題には、ワークを三次元的に移動させる設計を多く含んでいます。「ワークの向きを変えながら空間内を自在に移動する」、「障害物を避けながら所定の姿勢で立体的に通過する」などです。これらは自動車の組み立てラインや荷物のパレタイズ工程など実際の現場でも頻繁に求められる動きです。ただ、柔軟な動きができる一方で、可動範囲外エラーや特異点エラーといった、ロボットができない姿勢に直面しやすくもなります。自由度が高いからこそ逆にできない姿勢や注意すべき点もあるという、ロボットの限界と向き合う設計体験もこのE6応用編の学びの1つになっています。更に、テキストの各課題の最後には「動作の産業応用例」も記載されています。これによって、学習者自身が取り組んだ動きが実際の現場でどう生かされているのかを具体的にイメージすることができます。そして、これまでに培った6軸制御の基礎を元に、より高度な設計調整スキルが求められる場面にも対応しています。

例えば、画像のようにピンポイントな位置制御が必要な課題では、狙ったつもりでもワークの位置に微小なズレがあるとうまくいきません。座標の微調整や、姿勢の再設計を通じて目的の動作を「確実に成立させる工夫」が必要になります。どの角度・順序で姿勢を切り替えるか、干渉をどう避けるか…そんな繊細かつ構造的な判断力が求められるからこそ、現場で本当に活きるスキルを身につけられます。 「平面的な操作から、将来実務に生きる立体的な動きへとステップアップできる」それがE6応用編の内容の特徴です。
協働プラットフォーム活用編では、外部機器と連携するシステム全体の設計を学ぶことができます。協働プラットフォーム(正式名称は、「協働ロボットユニバーサルトレーニングプラットフォーム」)とは、センサー、コンベア、ビジョンカメラといった周辺機器を組み合わせることで、工場の自動搬送ラインのような一連のプロセスを実践的に学べる実習キットです。
この実習用キットをE6と連動させることで、「連携されたプロセス全体を体験できる」構成となっています。例えばセンサーで物体を検出して、それに応じてロボットアームが搬送や配置を行うなど幅広い活用が可能です。こういう制御では、ただロボットを動かすだけではなくて外部からの情報を判断して動くという視点が求められます。つまり情報の取得→判断→動作へ反映、という一連の流れをどう構成するかが設計のポイントになるのです。 協働プラットフォーム活用編は、ロボット単体の制御からシステム全体を見通した設計へと視点を広げられる実習構成となっています。実際の現場に近いシステムを体験することで、複数の要素を総合的に考える力が身につきます。つまり、「モノを動かすだけではなく、システムとしてどう動かすか、まで設計できる力が育つ」、それが協働プラットフォーム活用編の魅力です。
授業のテーマや、何を学ばせたいかは先生ごとに異なると思います。ハードに寄せたいのかソフトに寄せたいのか、広く網羅したいのか一点を深く掘り下げたいのか、等々。そのような多様な授業設計に合わせて選んでいただけるよう、本教材の課題をカテゴリーごとに整理しご紹介します。
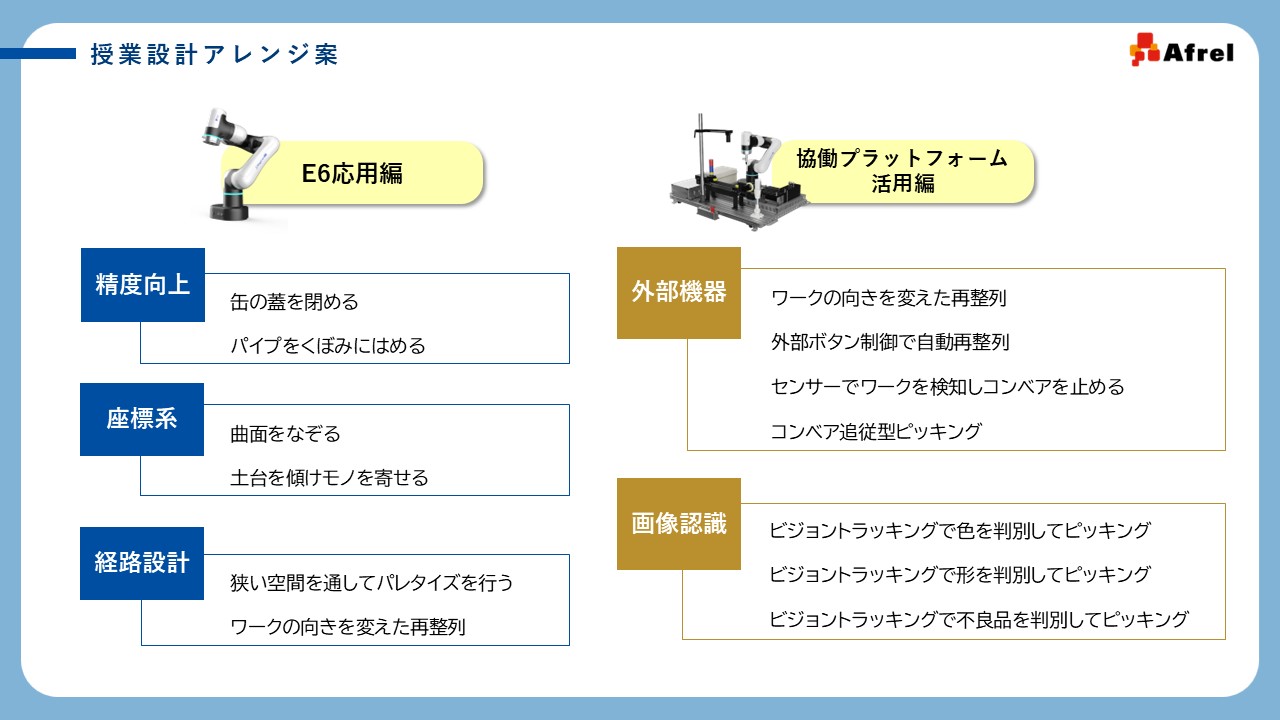
これらのカテゴリーは、授業の狙いやテーマに応じて柔軟に選択し活用できます。また、授業時間や学習者のレベルに応じて組み合わせを調整できる設計になっていることも大きな特徴です。テキスト通りに課題を進めていただくだけでも十分に実践的な演習として活用することができます。
最後に、学習者のスキルに応じて課題の難易度を上げたい時などに使えるアレンジ三選をご紹介します。
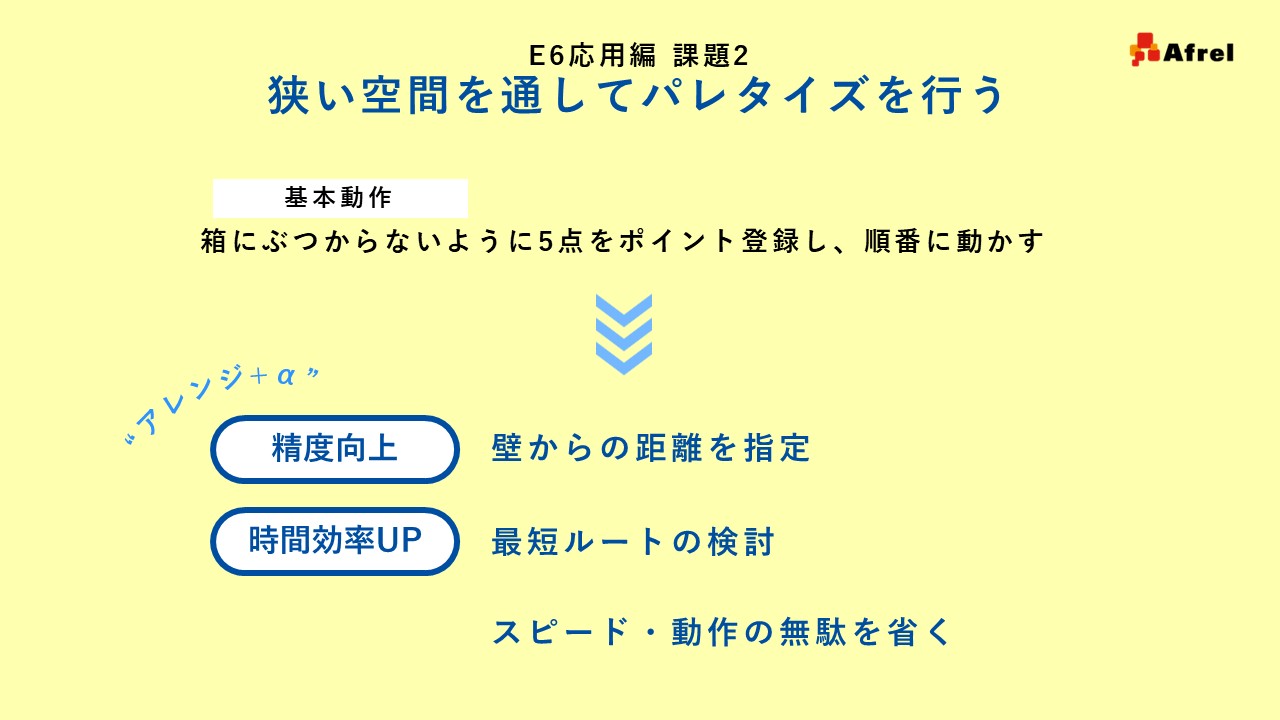
こちらはE6応用編「課題2:狭い空間を通してのパレタイズ」です。この課題ではサンプルプログラムとして「箱にぶつからないように5点をポイント登録し、順番に動作させる」という動きを用意していますが、この基本動作に対して、例えば、「壁からの距離を一定以上に保つ」という制約条件を加えたり、最短ルートを検討したり、スピードや加速度を調整して、動作の時間効率を高めるといったアレンジを加えることで、「精度の向上」「経路最適化」など、より現場的な視点での課題設計が可能になります。
2つ目のアレンジ例は、「協働プラットフォーム活用編:課題2(外部ボタン制御での自動再整列)」です。この課題は、「スタートボタンで動きだし、ストップボタンで止まるドミノ倒しプログラム」がベースになっています。ここに現場を想定した例外処理や状態管理の仕組みを加えていくと、より高度な“状態制御ロジック”に発展させることができます。
3つ目のアレンジ例は、「協働プラットフォーム活用編:課題5(ビジョントラッキングによる不良品検知)」です。この課題は「配置されたワークに対して画像認識を用い、不良品を判別・仕分けすること」が基本になっています。ここに「ベルトコンベアで流れてくるワーク」に対して画像処理を行うシステムのアレンジを加えることで、ビジョン検査から仕分けまでを流れとしてつなげた、「動的な製品検査システム」として構築することができます。コンベアと組み合わせることで、ワークの動きにタイミングを正確に合わせる制御設計が必要になるため、トラッキング精度や同期処理の工夫といった課題へとステップアップできます。
上記は、協働プラットフォーム活用編の集大成として取り組める発展アレンジとしてご紹介させていただきました。いずれのアレンジも組み合わせ方は自由なので、授業に合わせて工夫していただければと思います。
本教材が、先生方の授業設計や実践的な学びの場づくりにお役に立てれば幸いです。