2022年1月11日
DOBOTエラーコードの一覧
DOBOTのアームが動作範囲外などに移動するとステータスランプが赤く点灯して動作を停止します。ステータスランプが赤く点灯している場合は、エラーが発生しています。

発生するエラーと解除方法は、以下のとおりです。
| No. | アラーム タイプ |
エラー名 | 説明 | ログの記録 | ポップアップ | ポップアップの解除方法 (手動解除/ディレイ解除/条件付き解除) |
|---|---|---|---|---|---|---|
| 0 | General alarm | ERR_COMMON_RESET | Power on reset prompt パワーオンリセットを促す |
無 | 無 | No 無し |
| 1-15 | Retain | |||||
| 16 | Planner related error | ERR_PLAN_INV_SINGULARITY | Inverse solution anomaly 逆解の異常 |
有 | 有 | Manually cancel (manually clear alarm) 手動解除(手動でアラームをクリアする) |
| 17 | ERR_PLAN_INV_CALC | Calculation error of inverse solution 逆解の計算誤差 |
有 | 有 | Manually cancel (manually clear alarm) 手動解除(手動でアラームをクリアする) |
|
| 18 | ERR_PLAN_INV_LIMIT | The joint angle of the inverse solution exceeds the soft limit 逆解の関節角度がソフトリミットを超えている |
有 | 有 | Manually cancel (manually clear alarm) 手動解除(手動でアラームをクリアする) |
|
| 19 | ERR_PLAN_PUSH_DATA_REPEAT | The input data is repeated when the arc moves 円弧の移動時に入力データが繰り返される |
有 | 有 | Manually cancel (manually clear alarm) 手動解除(手動でアラームをクリアする) |
|
| 20 | ERR_PLAN_ARC_INPUT_PARAM | Error in input parameters of arc motion 円弧動作の入力パラメータに誤りがある |
有 | 有 | Manually cancel (manually clear alarm) 手動解除(手動でアラームをクリアする) |
|
| 21 | ERR_PLAN_JUMP_PARAM | Jump motion parameter exceeds limit value ジャンプ動作のパラメータが限界値を超えている |
有 | 有 | Manually cancel (manually clear alarm) 手動解除(手動でアラームをクリアする) |
|
| 22-31 | Retain | |||||
| 32 | Motion related alarms | ERR_MOVE_INV_SINGULARITY | Abnormal inverse solution in motion 動作中の逆解の異常 |
有 | 有 | Manually cancel (manually clear alarm) 手動解除(手動でアラームをクリアする) |
| 33 | ERR_MOVE_INV_CALC | Calculation error of inverse solution in motion 動作中の逆解の計算エラー |
有 | 有 | Manually cancel (manually clear alarm) 手動解除(手動でアラームをクリアする) |
|
| 34 | ERR_MOVE_INV_LIMIT | The joint angle of the inverse solution exceeds the soft limit 逆解の関節角度がソフトリミットを超えている |
有 | 有 | Manually cancel (manually clear alarm) 手動解除(手動でアラームをクリアする) |
|
| 35-47 | Retain | |||||
| 48-63 | Retain | |||||
| 64 | Limit related alarms | ERR_LIMIT_AXIS1_POS | Positive limit of axis 1 軸1が正の限界値 |
有 | 有 | The condition is cancelled (when the manipulator moves away from the limit position, the limit alarm will be automatically cleared internally) 条件付き解除(マニピュレーターがリミット位置から離れると、内部でリミットアラームが自動解除される) |
| 65 | ERR_LIMIT_AXIS1_NEG | Negative limit of axis 1 軸1が負の限界値 |
有 | 有 | The condition is cancelled (when the manipulator moves away from the limit position, the limit alarm will be automatically cleared internally) 条件付き解除(マニピュレーターがリミット位置から離れると、内部でリミットアラームが自動解除される) |
|
| 66 | ERR_LIMIT_AXIS2_POS | Positive limit of axis 2 軸2が正の限界値 |
有 | 有 | The condition is cancelled (when the manipulator moves away from the limit position, the limit alarm will be automatically cleared internally) 条件付き解除(マニピュレーターがリミット位置から離れると、内部でリミットアラームが自動解除される) |
|
| 67 | ERR_LIMIT_AXIS2_NEG | Negative limit of axis 2 軸2が負の限界値 |
有 | 有 | The condition is cancelled (when the manipulator moves away from the limit position, the limit alarm will be automatically cleared internally) 条件付き解除(マニピュレーターがリミット位置から離れると、内部でリミットアラームが自動解除される) |
|
| 68 | ERR_LIMIT_AXIS3_POS | Positive limit of axis 3 軸3が正の限界値 |
有 | 有 | The condition is cancelled (when the manipulator moves away from the limit position, the limit alarm will be automatically cleared internally) 条件付き解除(マニピュレーターがリミット位置から離れると、内部でリミットアラームが自動解除される) |
|
| 69 | ERR_LIMIT_AXIS3_NEG | Negative limit of axis 3 軸3が負の限界値 |
有 | 有 | The condition is cancelled (when the manipulator moves away from the limit position, the limit alarm will be automatically cleared internally) 条件付き解除(マニピュレーターがリミット位置から離れると、内部でリミットアラームが自動解除される) |
|
| 70 | ERR_LIMIT_AXIS4_POS | Positive limit of axis 4 軸4が正の限界値 |
有 | 有 | The condition is cancelled (when the manipulator moves away from the limit position, the limit alarm will be automatically cleared internally) 条件付き解除(マニピュレーターがリミット位置から離れると、内部でリミットアラームが自動解除される) |
|
| 71 | ERR_LIMIT_AXIS4_NEG | Negative limit of axis 4 軸4が負の限界値 |
有 | 有 | The condition is cancelled (when the manipulator moves away from the limit position, the limit alarm will be automatically cleared internally) 条件付き解除(マニピュレーターがリミット位置から離れると、内部でリミットアラームが自動解除される) |
|
| 72 | ERR_LIMIT_AXIS23_POS | Positive limit associated with axis 2 and axis 3 軸2と軸3に関連する正の限界値 |
有 | 有 | The condition is cancelled (when the manipulator moves away from the limit position, the limit alarm will be automatically cleared internally) 条件付き解除(マニピュレーターがリミット位置から離れると、内部でリミットアラームが自動解除される) |
|
| 73 | ERR_LIMIT_AXIS23_NEG | Negative limit associated with axis 2 and axis 3 軸2と軸3に関連する負の限界値 |
有 | 有 | The condition is cancelled (when the manipulator moves away from the limit position, the limit alarm will be automatically cleared internally) 条件付き解除(マニピュレーターがリミット位置から離れると、内部でリミットアラームが自動解除される) |
|
| 74-79 | Retain | |||||
| 80 | Lost step alarm | ERR_LOSE_STEP_AXIS1 | Lost step alarm of axis 1 軸1のステップ損失アラーム |
有 | 有 | Cancel the condition (after dragging to teach a point, the step loss alarm can be cleared internally) 条件付き解除(ドラッグでポイントティーチング後、ステップ損失アラームを内部で解除可能) |
| 81 | ERR_LOSE_STEP_AXIS2 | Lost step alarm of axis 2 軸2のステップ損失アラーム |
有 | 有 | Cancel the condition (after dragging to teach a point, the step loss alarm can be cleared internally) 条件付き解除(ドラッグでポイントティーチング後、ステップ損失アラームを内部で解除可能) |
|
| 82 | ERR_LOSE_STEP_AXIS3 | Lost step alarm of axis 3 軸3のステップ損失アラーム |
有 | 有 | Cancel the condition (after dragging to teach a point, the step loss alarm can be cleared internally) 条件付き解除(ドラッグでポイントティーチング後、ステップ損失アラームを内部で解除可能) |
|
| 83 | ERR_LOSE_STEP_AXIS4 | Lost step alarm of axis 4 軸4のステップ損失アラーム |
有 | 有 | Cancel the condition (after dragging to teach a point, the step loss alarm can be cleared internally) 条件付き解除(ドラッグでポイントティーチング後、ステップ損失アラームを内部で解除可能) |
|
| 84-95 | Retain | |||||
| 96 | Other alarm | ERR_OTHER_ZEROINITIAL_ANGLE | Encoder linearity look up table error alarm_ Axis 1 軸1のエンコーダ直線性ルックアップテーブルエラーのアラーム |
有 | 有 | Cancel the condition (drag the teaching to the next point, if there is no error in the table lookup, the alarm will be automatically cleared internally) 条件付き解除(次のポイントまでドラッグでティーチング後、テーブル検索にエラーがなければ、内部で自動的にアラームが解除される) |
| 97 | ERR_OTHER_ONEINITIAL_ANGLE | Encoder linearity look up table error alarm_ Axis 2 軸2のエンコーダ直線性ルックアップテーブルエラーのアラーム |
有 | 有 | Cancel the condition (drag the teaching to the next point, if there is no error in the table lookup, the alarm will be automatically cleared internally) 条件付き解除(次のポイントまでドラッグでティーチング後、テーブル検索にエラーがなければ、内部で自動的にアラームが解除される) |
|
| 98 | ERR_OTHER_TWOINITIAL_ANGLE | Encoder linearity look up table error alarm_ Axis 3 軸3のエンコーダ直線性ルックアップテーブルエラーのアラーム |
有 | 有 | Cancel the condition (drag the teaching to the next point, if there is no error in the table lookup, the alarm will be automatically cleared internally) 条件付き解除(次のポイントまでドラッグでティーチング後、テーブル検索にエラーがなければ、内部で自動的にアラームが解除される) |
|
| 99 | ERR_OTHER_OVERTEMP | Over temperature alarm オーバーヒートアラーム |
有 | 有 | The condition is cancelled (when the temperature exceeds 75 ℃, the alarm will be generated; when the temperature is lower than 50 ℃, the alarm will be automatically released.) 条件付き解除(75℃を超えるとアラーム発生、50℃を下回ると自動解除) |
|
| 100 | ERR_OTHER_TIMINGERR | Timing error alarm タイミングエラーアラーム |
有 | 有 | Condition cancelled (power on again) 条件付き解除(電源再投入) |
|
| 101 | ERR_OTHER_AXIS1_TMC2208SETERR | TMC2208 register setting error_ Axis 1 軸1のTMC2208レジスタ設定エラー |
有 | 有 | Manually cancel (manually clear alarm) 手動解除(手動でアラームをクリアする) |
|
| 102 | ERR_OTHER_AXIS2_TMC2208SETERR | TMC2208 register setting error_ Axis 2 軸2のTMC2208レジスタ設定エラー |
有 | 有 | Manually cancel (manually clear alarm) 手動解除(手動でアラームをクリアする) |
|
| 103 | ERR_OTHER_AXIS3_TMC2208SETERR | TMC2208 register setting error_ Axis 3 軸3のTMC2208レジスタ設定エラー |
有 | 有 | Manually cancel (manually clear alarm) 手動解除(手動でアラームをクリアする) |
|
| 104-111 | Retain | |||||
| 112-127 | Retain |
次の手順から発生しているエラーのエラーコードを確認することができます。
- DobotStudioを起動してください。
- COMポートを指定後、「Connect」から接続してください。
- エラーが発生している場合、下図の赤枠の部分にエラー名が表示されます。
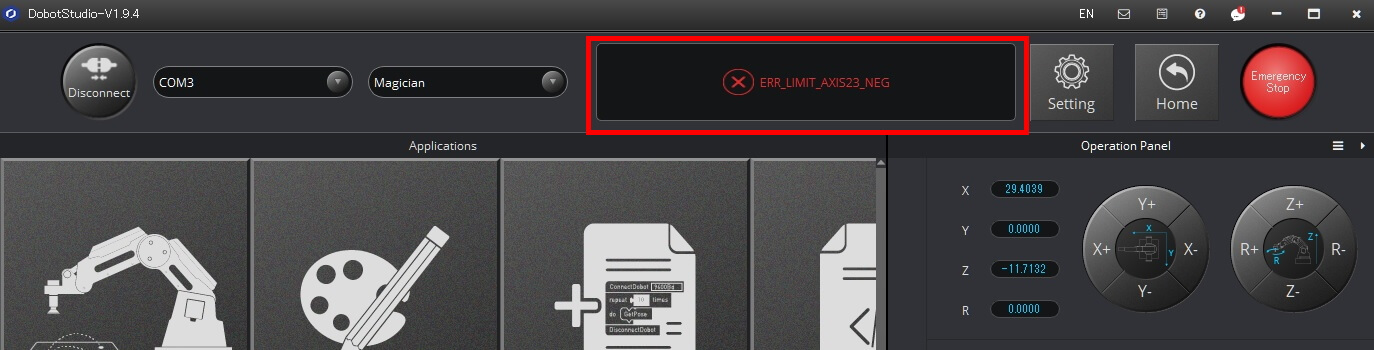
- エラーが表示されている部分をダブルクリックすると詳細画面が別ウィンドウで表示されます。
アラームは、アームのボタンを押しながら正常な位置に戻すことや、エラーの詳細画面からエラーを選び「Clear Alarm」をクリックすることなどで解除することができます。
エラーごとの解除方法の詳細は、上記の表を参照してください。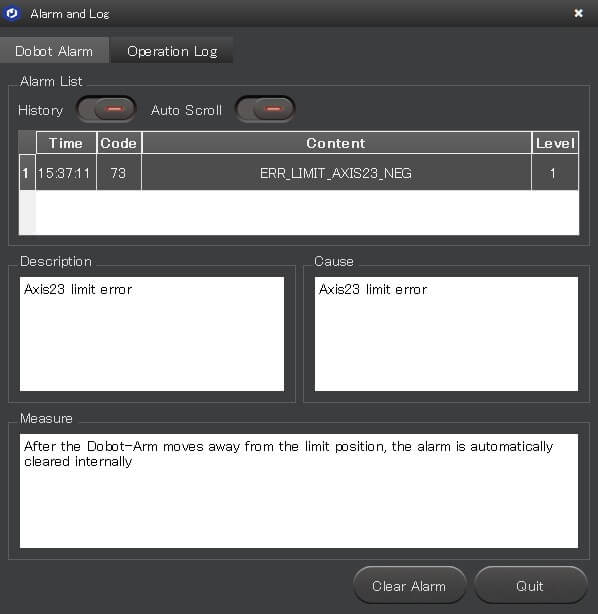
2021/12/28 現在最新バージョンのDobotStudio(V1.9.4)に基づく情報です。
※ソフトウェアのアップデートによって、手順等が変更される場合があります。
(2021/12/28 現在)