2017年3月1日
- EV3ソフトウェア
- EV3技術情報
- TETRIX技術情報
- ソフトウェア
- ソフトウェア
TETRIXをEV3ソフトウェアで動かすには-DCモータを動かす
EV3ソフトウェアでTETRIXのDCモータを動かす方法を紹介します。
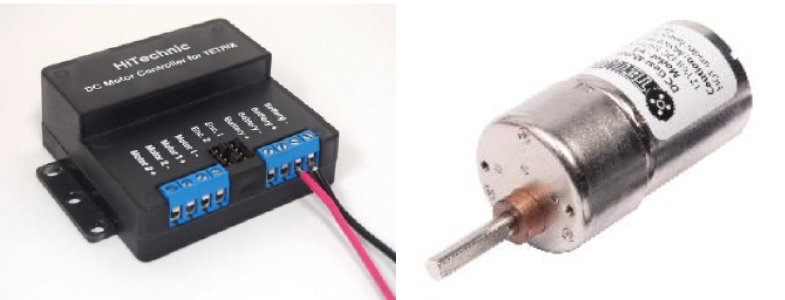
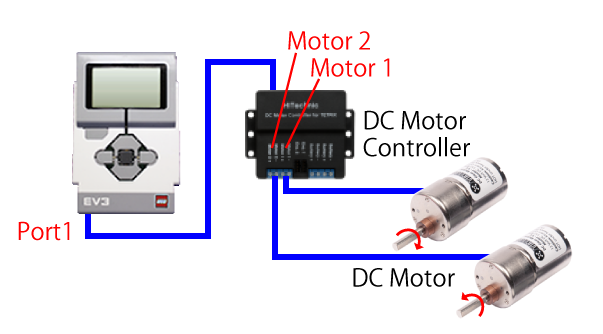
ここで紹介する内容は、左図の仕様変更前のDCモーターコントローラー(商品型番:PI-W34303)とDCギアモーター(商品型番:PI-W39530)を使用したものです。
仕様変更後のTETRIX MAX DC Motor Expansion Controller(商品型番:PI-W44354)とTETRIX TorqueNADOモーター(商品型番:PI-W44260)を使用する場合はこちらをご覧ください。
仕様変更前後の製品についてはこちらをご覧ください。
なお、EV3ソフトウェアにTETRIX用のプログラミングブロックを追加していない場合は、こちらから追加してください。
 EV3ソフトウェアでTETRIXのDCモータを動かすには、「HiTechnic Motor Controller for TETRIX」ブロックを使用します。
DCモータを回転させるには「Move→Unlimited」モードを、停止させるには「Move→Stop」モードを、選択します。
EV3ソフトウェアでTETRIXのDCモータを動かすには、「HiTechnic Motor Controller for TETRIX」ブロックを使用します。
DCモータを回転させるには「Move→Unlimited」モードを、停止させるには「Move→Stop」モードを、選択します。
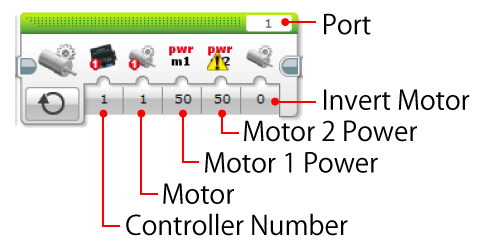
 Move→Unlimitedモードの各パラメータは以下のとおりです。
Move→Unlimitedモードの各パラメータは以下のとおりです。
 |
|
| Port | TETRIXのモーターコントローラーが接続されているEV3のセンサーポートの番号を選択します。 |
| Controller Number | EV3からみて、何番目のモーターコントローラーに接続されているDCモータを制御するかを選択します。 |
| Motor | モーターコントローラーに接続されているDCモータのうち、どれを回転させるかを選択します。 Motor 1:Motor 1に接続されているモータ Motor 2:Motor 2に接続されているモータ Both Motors:両方のモータ |
| Motor 1 Power | パラメータ「Motor」で、「Motor 1」または「Both Motors」を選択したとき、モーターコントローラーのMotor 1に接続されているDCモータの回転パワー(スピード)を入力します。 -100~100の範囲で指定します。 |
| Motor 2 Power | パラメータ「Motor」で、「Motor 2」または「Both Motors」を選択したとき、モーターコントローラーのMotor 2に接続されているDCモータの回転パワー(スピード)を入力します。 -100~100の範囲で指定します。 |
| Invert Motor | 回転方向を反転させるDCモータを指定します。 None:どちらのモータも反転させない Motor 1:Motor 1に接続されているモータを反転 Motor 2:Motor 2に接続されているモータを反転 Both Motors:両方のモータを反転 |
 |
|
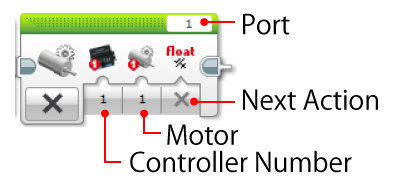
| Port | TETRIXのモーターコントローラーが接続されているEV3のセンサーポートの番号を選択します。 |
| Port | TETRIXのモーターコントローラーが接続されているEV3のセンサーポートの番号を選択します。 |
| Controller Number | EV3からみて、何番目のモーターコントローラーに接続されているDCモータを制御するかを選択します。 Motor モーターコントローラーに接続されているDCモータのうち、どれを停止させるかを選択します。 Motor 1:Motor 1に接続されているモータ Motor 2:Motor 2に接続されているモータ Both Motors:両方のモータ |
| Next Action | DCモータのブレーキ方法を選択します。 True(Brake):モータをすぐに停止 False(Float):モータパワーが0になり、惰性で回転後停止 |
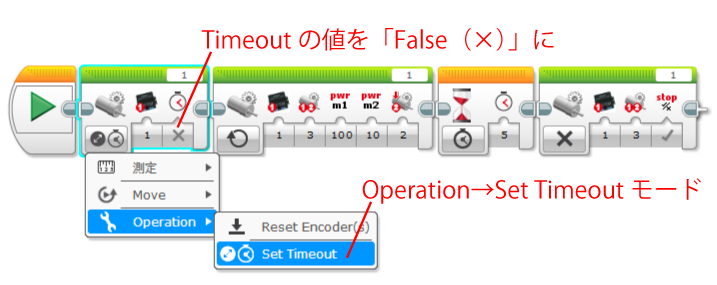
 次のようなプログラムになります。
次のようなプログラムになります。
 ただし、初期状態ではタイムアウト機能がオンになっているため、回転しているDCモータに対して2.5秒以上何も命令がされないと、DCモータは停止します。
例えば上図のプログラムの待機ブロックの時間を「5秒」とした場合、DCモータは5秒経過するのを待たず、2.5秒回転して停止してしまいます。
これを回避するには、「Operation→Set Timeout」モードを選択し、パラメータ「Timeout」でFalseを選択して、タイムアウト機能をオフにします。
タイムアウト機能をオフにして、上図のプログラムの回転時間を5秒間に変更すると、このようになります。
ただし、初期状態ではタイムアウト機能がオンになっているため、回転しているDCモータに対して2.5秒以上何も命令がされないと、DCモータは停止します。
例えば上図のプログラムの待機ブロックの時間を「5秒」とした場合、DCモータは5秒経過するのを待たず、2.5秒回転して停止してしまいます。
これを回避するには、「Operation→Set Timeout」モードを選択し、パラメータ「Timeout」でFalseを選択して、タイムアウト機能をオフにします。
タイムアウト機能をオフにして、上図のプログラムの回転時間を5秒間に変更すると、このようになります。
 タイムアウト機能の設定は、そのプログラムの中で有効です。
タイムアウト機能をオフにした場合、プログラムが終了してもDCモータは回転し続けるため、プログラムの中でDCモータを停止させる必要がある点に注意します。
タイムアウト機能の設定は、そのプログラムの中で有効です。
タイムアウト機能をオフにした場合、プログラムが終了してもDCモータは回転し続けるため、プログラムの中でDCモータを停止させる必要がある点に注意します。
(2018/03/27 現在)